今天小编要和大家分享的是CAN总线控制器主要特性 CAN总线控制器CAN总线控制规范,接下来我将从CAN总线控制器的主要特性,CAN总线控制规范,这几个方面来介绍。
CAN总线控制器即Controller Area Network Bus控制器,作为一种技术先进,可靠性高,功能完善,成本合理的远程网络通讯控制方式,CAN-bus控制逐步被广泛应用到各种控制领域。CAN-bus是唯一成为国际标准的现场总线,也是国际上应用 最广泛的现场总线之一.

CAN总线控制器的主要特性
多主结构依据优先权进行总线访问
无破坏性的基于优先权的逐位仲裁
借助验收上检测到扩展帧报文(29位的标识码)也是容许的,并且如果报文正确的话,会给出一个应答信号,但是不会产生接收中断.而peliCAN工作模式则完全支持扩展帧报文,功能强大.包含BasicCAN又比其功能多.
CAN总线控制规范
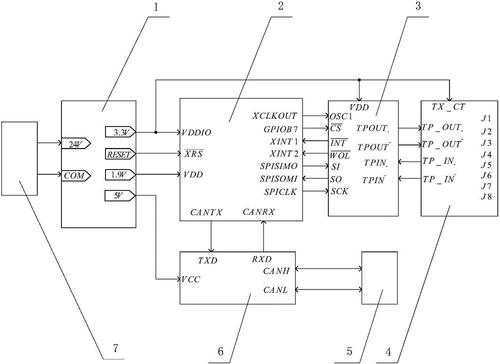
CAN总线控制器功能框图
接口管理逻辑
接口管理逻辑(IML)解释来自
发送缓冲器(TXB)是CpU和BSp(位流处理器)之间的接口.它能够存储通过CAN网络发送的一条完整报文.缓冲器长13个字节,由CpU写入,BSp读出.
接收缓冲器
接收缓冲器(RXB,RXFIFO)是接收滤波器和CpU之间的接口,用来存储从CAN总线上接收并被确认的信息.接收缓冲器(RXB,13个字节)作为接收FIFO的一个窗口,可以被CpU访问.Cpu在此FIFO的支持下,可以处理一条报文的同时接收其他报文
验收滤波器
验收滤波器(AcFAcceptaneeFilter)把它的内容和接收到的标示码相比较,以决定是否接收下条报文.在验收测试通过后,这条完整的报文就被保存在RXFIFO中.
位流处理器
位流处理器(BSp)是一个在发送缓冲器,RXFIFO和CAN总线之间的控制数据流的序列发生器.它还执行总线上的错误监测,仲裁,填充和错误处理,是本设计中的重点模块,属于cAN总线控制器中的中心模块
位时序逻辑
位时序逻辑(BTL)监视串行的CAN总线和位时序.它是一条报文开头,总线传输出现到显性时同步于CAN总线上的位流(硬同步),并且在其后接收一条报文的传输过程中在同步(软同步).BTL还提供了可编程的时间段来补偿传播延时,相位偏移和定义采样点和每一位采样次数.本次设计不涉及这一块的内容.
错误管理逻辑
错误管理逻辑(EML)负责限制传输层模块的错误.它接收来自BSp的出错报告,然后把有关错误统计告诉BSp(位流处理器)和IML(接口管理逻辑).
关于CAN总线控制器,电子元器件资料就介绍完了,您有什么想法可以联系小编。