(3)上位机用功能强大的LabVIEW图形化编程实现,完成参数设置,张力在线监控显示。其中,显示内容包括设定张力值、实测张力值、张力控制器运行状态(手动、自动及参数设置状态)等。
2 系统硬件设计
2.1 处理器选择
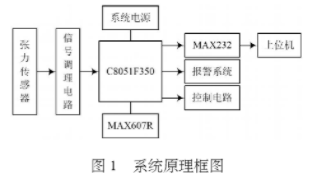
根据张力控制原理,本文采用称重法实现张力检测与控制。它需二路传感器输入信号和一路恒流输出控制信号,并对其信号进行A/D,D/A转换。为此,该系统控制器需选用具有A/D和D/A功能的嵌入式混合信号微处理芯片,避免采用片外A/D和D/A转换器,从而简化线路,降低成本。本文依据上述需要选择C8051F350 MPU为嵌入式处理器,其内部含有一个全差分24位∑-△A/D、带模拟多路开关、2个8位电流输出DAC,具有在片校准和抽取滤波器及内部电压基准和8种增益设置等多项功能。其中,D/A利用C8051F350的可编程计数阵列(PCA)脉宽调制(PWM)功能,具有16位转换精度,且便于光电隔离。硬件实现参数包括SPI,SMBus/IIC和1个UART串行接口,8 KB可在系统编程的FLASH存储器,768 B(512+256)的片内RAM,片内看门狗定时器,1个比较器,以及VDD监视器和温度传感器,17个I/O端口,-40~+85℃工业级温度范围,2.7~3.6 V工作电压。
2.2 张力传感器及信号调理电路设计
传感器选择主要通过分析丝线张力传感器的原理与种类,选择电阻应变式张力传感器,FK6张力传感器(Tension Sensor)可替代进口的张力传感器,具有指标优越稳定、免校准、测量精准、价格较低等优点。对于加弹应用环境具有针对性的抗干扰能力,抗破坏能力强,免维护,寿命长的特点。其性能指标如下: