这就是说,在相关前,利用小波分别对信号x1(t)和x2(t)进行滤波。因为小波加权相对经典加权不需要信号和噪声的先验知识,这也可说在x1(t)和x2(t)相关后再用小波变换处理其相关函数Rx1x2(τ)。[page]
2.2 定位算法
声探测定位技术是利用目标发出的噪声来对目标进行定位的。如何设计性能优良、结构简单合理的声阵是被动声定位的关键技术之一。传声器阵列可分为线阵、面阵和立体阵。线阵结构简单,但线阵只能对阵列所在直线为界的半个平面进行定位。面阵可以在整个平面对目标进行定位,也可以对阵列所在平面为界的半个空间进行定位。立体阵则可以对整个空间进行定位,但其算法要复杂的多。从实际应用角度考虑,采用立体正方形阵来进行目标定位。
立体阵声探测定位系统传声器的布置如图3所示。其中S表示目标点声源,Ml,M2,M3和M4分别表示4个传声器。采用直角坐标系表示,4个传声器位于x0y平面上。设基阵边长为L,M1,M3高为h,则传声器的坐标分别为M1(L/2,L/2,h),M2(L/2,L/2,0),M3(L/2,一L/2,h),M4(L/2,一L/2,0)。目标点声源的坐标为(x,y,z)。S点距原点距离为r,目标方位角为ψ,仰角为θ,设声源S到M1,M2,M3和M4的距离分别为r1,r2,r3和r4。并规定dij表示传声器Mi与Mj距点声源的距离差,即:

在直角坐标系中,可以得到如下方程组:
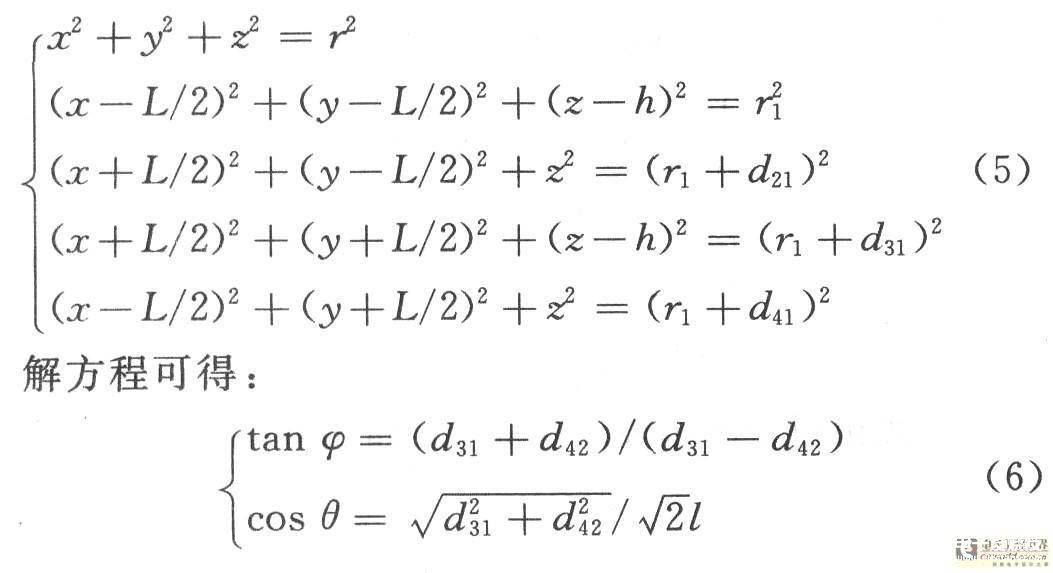
3 仿真