(2)PID控制算法
本系统试验了3种PID控制算法:位置式PID控制算法、增量式PID控制算法和积分分离PID控制算法。
1) 位置式PID控制算法

该算法的优点是原理简单,只是将经典的PID算法理论离散化,运用于计算机辅助测量,结构简单易于实现;缺点是每次输出均与过去的状态有关,计算时要对e(k)进行累加,计算机运算工作量大;而且,因为计算机输出的u(k)对应的是执行机构的实际位置,如计算机出现故障,u(k)的大幅度变化会引起执行机构位置的大幅度变化。
2) 增量式PID控制算法

该算法的优点是,由于计算机输出增量,误动作时影响小,必要时可以用逻辑判断的方法去掉;手动/自动切换时冲击小,便于实现无扰动切换,此外当计算机发生故障时,由于输出通道或执行装置具有信号的锁存作用,故仍能保持原值;算式中不需要累加。控制增量Δu(k)的确定,仅与最近k次的采样值有关,所以较容易通过加权处理而获得比较好的控制效果。增量式控制也有不足之处:积分截断效应大,有静态误差;溢出的影响大。
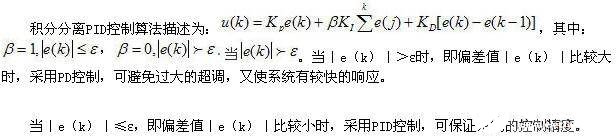
3)积分分离PID控制算法