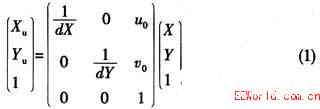
图像中某点在以毫米为单位的图像坐标系中的坐标与其在以像素为单位的图像坐标系中的坐标的变换关系如下:
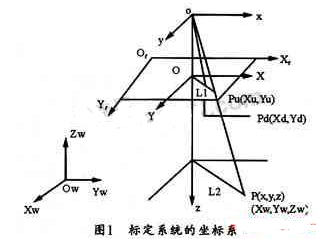
空间某点在世界坐标系中的坐标与其在摄像机坐标系中的坐标变换关系如下:
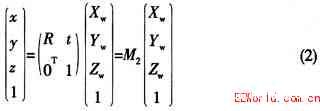
其中,为3×3正交单位矩;t为三维平移向量;M2为4×4矩阵。
由于针孔成像模型有如下关系:

所以,将(1),(2)代入上式的齐次坐标和矩阵表示可得:
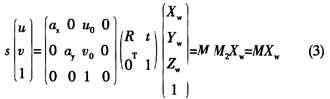
其中,M1为摄像机内参数,M2为摄像机外参数。确定某一摄像机参数称为摄像机定标。
2 、标定分类
总的来说,摄像机标定可以分为传统的摄像机标定方法和摄像机自标定方法两大类。传统摄像机标定的基本方法是在一定的摄像机模型下,通过对特定标定参照物进行图像处理,并利用一系列数学变换公式计算及优化,来求取摄像机模型内部参数和外部参数。然而,该方法在场景未知和摄像机任意运动的一般情况下,其标定很难实现。20世纪90年代初,Faugeras,Luong,Maybank等人首次提出了摄像机自标定方法。这种自标定法利用摄像机本身参数之间的约束关系来标定,而与场景和摄像机的运动无关,所以更为灵活。