(3)同步控制
虽然已经建立了初步的模型,并采用模糊PID进行调节,但为了进一步提高伺服系统的同步性,将两者的位置或速度差,乘以适当的系数,形成一个微小值。对速度快者降低电压设定值,对速度慢者提高电压设定值,实现对两台电机的同步控制。由于在转速较低的情况下,电机对对电压信号更为敏感,因而此时系数可以设置的较小,高速时系数可以设置的较大,但两种情况下均不能设的很大,否则会导致电机不稳定。
3.实验结果
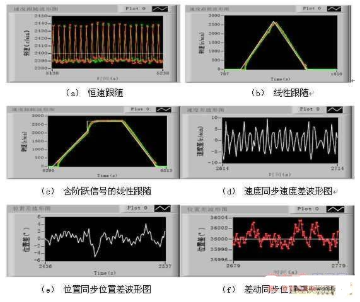
本同步伺服系统共完成了速度跟随、速度同步、位置同步、差动同步四种实验,其中速度跟随包括恒速跟随、线性跟随、含阶跃信号的线性跟随三种。以下图3中a、 b、c中白色直线表示设定值,红色●表示甲电机的实验结果绿色×表示乙电机的实验结果; d、e中白色直线表示实际差值;f中白色直线表示设定值,红色● 表示实际差值。
4.实验数据处理及分析
(1)对于输入的数字信号,伺服系统能实现如图3中a、b、c所示波形的实时速度跟随。
(2)能够实现两台电机的实时速度同步运行,闭环控制,如图3中d所示绝对误差不累积,相对转速差不累积且可以控制在10r/min以内。
(3)能实现两台电机的实时位置同步运行,闭环控制,如图3中e所示绝对误差不累积,相对角度差不累积且可以控制在±6°以内。
(4)能够实现单台电机预先转动给定角度后,另一台电机才开始转动,然后两台电机保持该恒定相位差同步运行,如图3中f所示,误差控制在±4°。
5.结论