系统设计
1、 系统组成
系统由控制计算机、NI PCI-4551、NI PCI-4472、BNC-2140、功率放大器、电荷放大器、传感器、激振器、试件、夹具及连接电缆等组成(见图1)。系统使用仪器设备见表1。其基本工作原理为:控制计算机生成驱动信号由PCI-4551卡输出经功率放大器放大后给激振器来产生随机振动,同时由安装在试件(或夹具)上的加速度传感器拾振,经电荷放大器后通过PCI-4472采集输入到控制计算机,从而形成闭环控制。在实际试验过程中,由于外界干扰或系统特性的影响,控制过程应反复进行,以使控制点处的振动能够达到并保持试验规范要求。
图1 系统组成框图
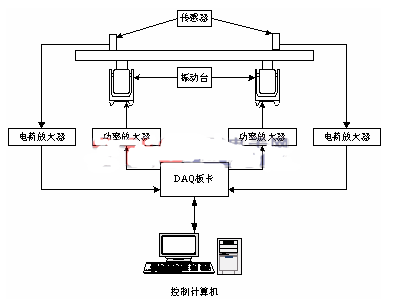
表1 系统仪器设备使用列表

2、 控制方案
随机振动试验目的是要求控制点的响应谱与参考谱在误差容许范围内保持一致。多点激励随机振动控制方案如图2所示。控制方案的第一步是由参考谱密度阵 来得到下三角阵[Z]的初始值;第二步估计被控系统的频响特性矩阵[H],对被控系统进行解耦得到解耦矩阵[A],即控制器;第三步是利用[Z]的初始值,系统的解耦矩阵[A]及独立(不相关)白噪声频谱向量{W}开始试验。闭环控制的基本原理是白噪声源{W}通过下三角阵[Z]得到{X},然后经过解耦矩阵[A]得到驱动信号频谱向量{D},对其进行逆FFT变换得到时域驱动信号{d},用驱动信号激励被控系统得到时域响应信号{c},计算响应谱密度阵 ,利用 和 来修正下三角阵[Z]从而实现闭环控制。在进行闭环控制时,如果驱动谱密度矩阵是非奇异的,则可以利用驱动谱密度矩阵 和响应谱密度矩阵 来修正被控系统的频响特性矩阵[H]和解耦矩阵[A]。如果驱动谱密度阵是奇异的,则无法修正,不过可以根据控制误差大小来对解耦矩阵进行逐步部分修正。