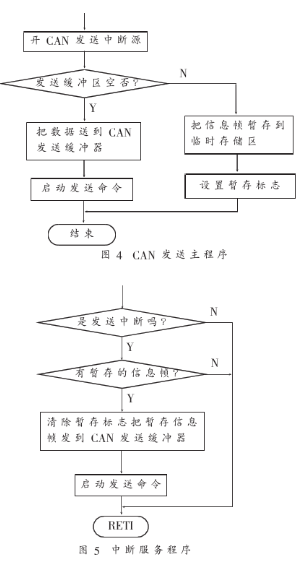
2.2.2 发送程序
信息从CAN控制器发送到CAN总线是由CAN挖掘器自动完成的。发送程序只需把发送的信息帧送到CAN的发送缓冲区,且启动发送命令即可。发送程序可采用查询方式或中断方式比较简单,这里仅讨论中断方式发送程序的设计。对于中断方式,发送程序分为两部分:一是主程序;二是中断服务程序。主程序主要用于控制信息发送及当发送缓冲区满时,把发送的信息暂存到临时存储区;中断发送程序负责把临时存储区的暂存信息发送出去。两者的流程图如图分别见图4、图5。
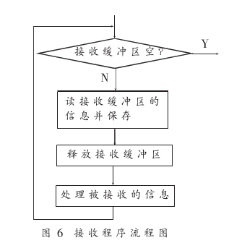
2.2.3 接收程序
信息从CAN总线到CAN接收缓冲区是由CAN控制器自动完成的。接收程序只需从接收缓冲区读取要接的信息即可。接收程序也可采用查询方式或中断方式,两者的繁简程度相当,此处经查询方式为例给出接收程序的流程图(见图6)。
以上给出的流程图均为一般性流程图。在使用时应结合实际项目具体化,并且发送程序中可能会有应急处理,接收程序中会有数据过载情况。限于篇幅,此处不予以讨论。
基于CAN控制器的单片机多机通信系统,由于其通信效率高、抗干扰性强、传输距离较远,适合于中小型分布式控制系统,且由于其价格低廉,在低成本自动化领域有着广泛的应用空间。
责任编辑:gt
关于嵌入式技术就介绍完了,您有什么想法可以联系小编。