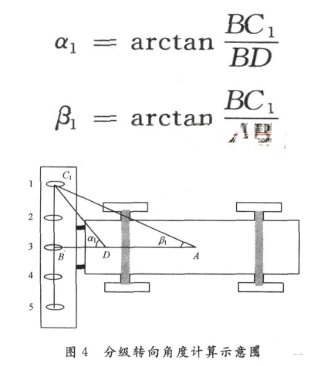
V3值线性正比于前轮舵机中可变电阻角度α1,因此,不同的传感器探测位置,可以计算得出不同的理想前轮转向角度,不同的理想转向A/D电压,通过单片机测量V3,即可换算前轮舵机中可变电阻转向角度a1,并与理想转向A/D电压比较,当V3达到理想转向A/D电压,单片机控制给舵机低电平,舵机停转,保持转向,从而实现精确分级转向。
3、 软件设计
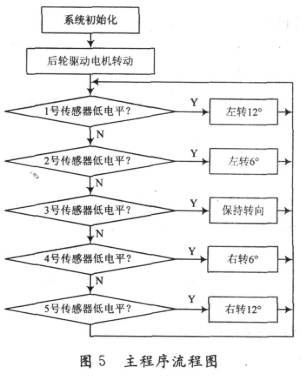
3.1 主程序设计
采用C语言在ICC—AVR开发环境下进行编程调试。主程序流程图如图5所示。
3.2 分级模块程序设计
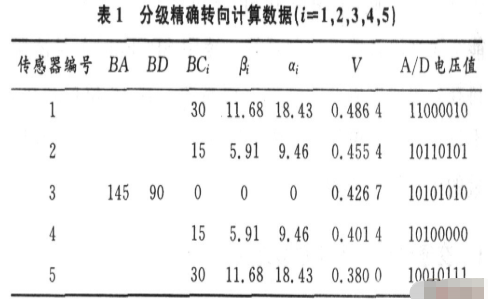
ATMEGAl6能对来自端口A的8路单端输入电压进行采样。当片中ADC多功能寄存器ADMUX的REFSl和 REFS0设置为1时,VAREF=2.56 V,为片内稳定基准电压源,即图3中电压V。智能寻迹车转向极限为±30°,表1为5个光电传感器分级精确转向相应计算数据。
4 、结 语
基于视觉的智能寻迹车模设计方案能够在线型复杂,转弯半径不确定性大的情况下,利用视觉自主寻迹前进,分级精确转向。对于环境光线的影响,可考虑增加滤波电路、优化控制算法增加其抗干扰能力。实验证明,该方案有良好的寻迹效果。
责任编辑:gt
关于嵌入式技术就介绍完了,您有什么想法可以联系小编。