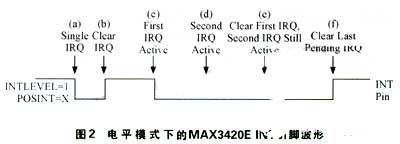
SPI主控制器完成中断服务后将向IRQ位写入1,并将其清零,并使INT引脚返回至静态高电平。(a)和(b)之间的间隔是中断置位其IRQ位和SPI主控制器清除IRQ位之间的时间,当系统产生另一个中断请求,会将INT引脚拉低,而当第一个中断请求处于悬挂状态时,系统可能产生第二个中断请求,而此时INT电平没有变化,因此至少有一个中断处于悬挂状态(实际上,此刻有两个中断处于悬挂状态。)
当SPI主控制器完成一个中断服务向IRQ位写入1并将其清零后,由于仍有一个中断处于悬挂状态,INT引脚将保持低电平,此后SIP主控制器处理完剩下的中断请求,并向IRQ位写入1,在将其清零,此后由于没有中断处于悬挂状态,因此,INT引脚将返回至静态高电平。
这种逻辑可以很好地处理INT引脚轮询,如果MAX3420E的任何部分需要服务,并且其中断已被使能,那么INT引脚将变为低电平,在微控制器清除最后一个悬挂IRQ位之前,INT引脚一直保持低电平。
◇ 边沿模式
图3所示为两种极性边沿模式下MAX3420E的INT引脚波形,极性由POSINT位控制。该波形与电平模式相似,但有两处不同,在两种条件下,INT引脚将产生边沿跳变:第一是一个IRQ位变为有效状态(其IRQ触发器产生0到1跳变),此时处理器将清除一个IRQ位(向其写入1),其他IRQ处于悬挂状态,第二个条件是在确保还有中断需要服务时,处理器能够检测到边沿跳变。

除了产生边沿跳变外,与电平模式一样,INT引脚也具有有效和无效状态,INT引脚的无效状态取决于POSINT位设置的边沿极性,在这一点上,边沿模式与电平模式相似,察看INT引脚的状态就可以知道是否有中断处于悬挂状态,当在负极性边沿模式下如果没有悬挂中断,INT引脚为高电平,如果有悬挂中断,则为低电平,而在正极性边沿模式下,如果没有悬挂中断,INT引脚为低电平,如果有悬挂中断,则为高电平。