VxWorks支持END(增加型网络驱动)格式的以太网控制器驱动,提供MUX层作为网络协议和以太网控制器驱动间的接口,MUX规定了驱动的接口函数,RTL8139驱动程序Rtl8139End.c是完全按照END格式编写的代码,提供了所有MUX层规定的接口函数,只要写好RTL8139 PCI配制空间寄存器,在sysRtl8139End.c中传入PCI空间首地址、中断向量号和中断优先级参数,按照END格式驱动装载程序,装载成功后RTL8139就能顺利运行。
2、 驱动程序中需要解决的问题
如果数据包的收发速率是均匀的,RTL8139完全可以达到前文提出的要求,但是Internet上经常有突发的数据包,而RTL8139的接收FIFO和发送FIFO都只有2Kb,加之RTL8139对收发数据包采取完全拷贝方式,在数据包突发期间,CPU占用率过高,来不及处理过多的数据包,从而造成丢包。在Rtl8139End.c中,驱动的数据包缓冲和协议栈的内存池是完全分开的,数据包接收和发送都有1次拷贝过程,而高性能以太网控制器一般只在发送时需要拷贝1次,这样每收发一个包,CPU需要多拷贝1次,这是导致RTL8139性能不高的重要原因,但这种包处理方式是由硬件决定的,驱动程序不能改变。事实上,在突发包很多的情况下,以太网控制器丢包是允许的,但突发时间过后,应恢复正常的收发包流程。但在前文介绍的硬件平台上运行Rtl8139End.c,在PC机上用Sniffer以连续方式给RTL8139发数据包,测试时间为数十秒,停止发包后,在PC机上用ping命令测试RTL8139能否正常回包,结果不能ping通,表明RTL8139的收发包流程因突发包太多而中断,且不能恢复。
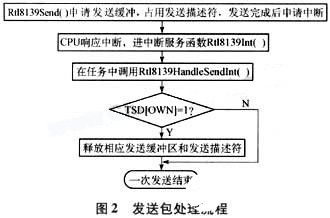
分析Rtl8139End.c程序,其发送数据包流程如图2所示。