[5]
这里 TableP、TableI和 TableD分别为包含 KP*Error、Ki*ErrorI和 Kd*ErrorD值的 LUT。
比较
PID 系统的实施是采用赛普拉斯软件 PSoC Designer 在 CY8C27x43 芯片中进行的。为实施 LUT 法,使用了各存有 60 个值的三张表,使用的 ROM 为 1,150 字节。对同一应用,公式法需使用 1,800 字节的 RAM。两种方法的执行时间如图 4 所示。
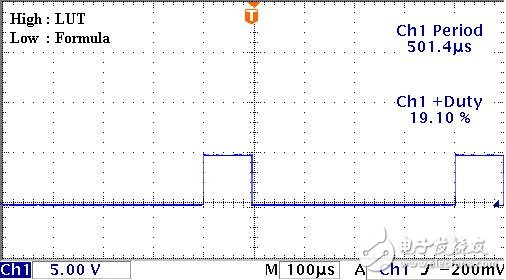
图 4:PID 系统的执行时间
上图波形与图 2 相似,高电平信号对应的是 LUT 法的执行速度,低电平信号对应的是公式法的执行速度。显而易见,执行速度提升了 4 倍。
结论:
本次探讨及案例研究显示,LUT 法确实能够加快程序执行的速度。对于具体的应用,程序执行中还有其他需要在选择实施方法之前加以权衡的问题。最终选择哪种方法则取决于应用的规范。不过,如果旨在加快执行速度并减少存储器占用,则化费时间构建 LUT 也是在所不惜的。
关于控制,MCU就介绍完了,您有什么想法可以联系小编。