2 系统建模与环路补偿设计
升压型LED驱动电路以及控制环路图如图1所示。通过电阻Rs1采样负载LED电流输入电压误差放大器(EA),误差放大器的输出经过补偿网络输出作为电流峰值比较器的基准,电阻Rs2采样开关管S1上的电流输入比较器的正端,Ramp是峰值电流控制中的斜坡补偿电流。时钟信号CLK确定开关频率与开关管的开通,当电流信号大于设定的阈值时,比较器的输出变高触发逻辑电路翻转开关管关断。
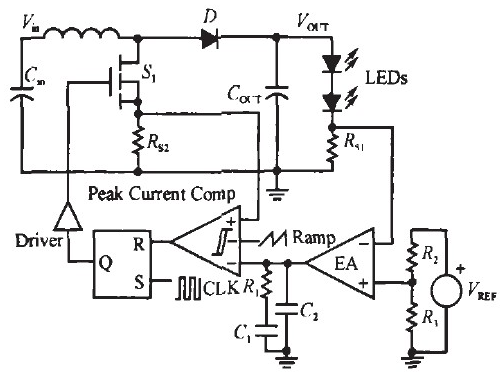
图1 升压型LED驱动电路控制图
可建立如图2所示的小信号模型电路。对于升压型的功率级电路,利用状态空间平均法可以得到原功率级两个重要的传递函数Gvd(s),Gid(s)并根据图中模型可以推导出输出电压对指令电流信号的等效功率级传函Ap(s)。

图2 峰值电流模式控制小信号模型

其中Fm=1/MaTs,Fv=D‘’2Ts/2L,Ma是斜坡补偿电流的斜率,L是滤波电感,Ts是开关周期,D是稳态占空比。考虑整个环路的传递函数T(s);

补偿前的环路传函幅相频曲线如图3中所示,系统有两个极点(p1,p2),一个左半平面的零点z(输出电容ESR引起),一个右半平面的零点z1.这里需要指出的是,如果没有带斜坡补偿电路的电流反馈控制系统的引入,输出LCR网络决定环路系统是一个高Q值的系统,而电流反馈使得系统的Q值大大地减小,但右半平面的零点会提高穿越频率并使得相位裕度更差。可以采用的补偿方法是加入一个单零点单极点的补偿网络如图3所示,Gc(s)表达式为,


图3 补偿前后系统开环频率响应
其中z2用来补偿极点p1,坐标原点的极点可以提高低频的环路增益以较小直流稳态误差,p3抵消z1带来的幅度增加,抑制接近开频频率的噪声,最终的穿越频率fc设定在开关频率的1/10左右。最简单的补偿方法也可以采用单极点的补偿网络,为保证相位裕度就会带来缺点即环路的带宽会更小,系统动态响应变慢。对于实际应用的升压型的LED驱动电路进行建模并在MATLAB中仿真结果(如图4所示),从仿真的结果看,环路在这种斜坡电流和补偿网络设计下在穿越频率附近的相位裕度大于45°,系统是稳定的,与公式推算的结果基本相符。