2 系统硬件设计
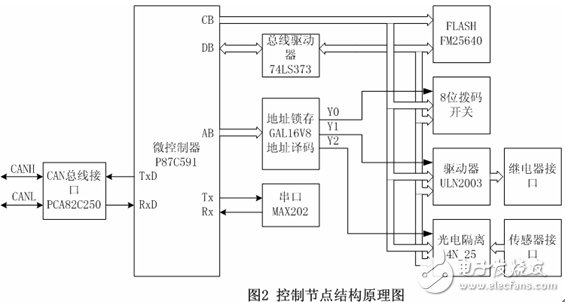
控制节点按功能可以划分为不同的类型,但是其基本的结构相同。控制节点的电路结构如图2所示。主要由微控制器、CAN总线驱动器、外部存储器、串行接口、电源部分等组成。
微控制器采用PHILIPS公司的P87C591,P87C591是一个单片8位高性能微控制器,具有片内CAN控制器,它采用了80C51指令集并成功的包括了Philips半导体SJA1000CAN控制器的Pelican功能(该模式支持具有很多新特性的CAN2.0B协议),同时该微控制器具有内置看门狗,内部程序存储器为16K字节。采用该控制器可以大大简化电路设计并节省应用空间。
外部存储器的作用是存储从上位机下载下来的控制方案。外部存储器采用RAMTRON公司的FM25640。该芯片采用铁电存储技术,具有高速非易失的特性,采用SPI接口连接,容量是64K位。该芯片用于存储节点间的控制方案,同时也可以当作系统的缓冲区。
继电器接口用于连接控制节点与照明回路,通过该接口控制节点可以控制照明设备的开关。
串行接口电路采用标准RS-232接口芯片——MAX202,使用该接口可以使节点在无需连接网络的情况下也可以进行节点间互连关系的上传和下载,同时也可以当作调试的接口。8位拨码开关用于设定节点的逻辑地址,各个节点根据这个逻辑地址进行相互识别。
3 系统软件设计
3.1 上位机管理软件设计
上位机管理软件实现的主要功能如下:
1)系统控制方案的新建、修改、保存:用户可以通过管理软件建立并修改控制方案,或者将控制方案以文件形式保存,以备以后使用。
2)系统控制方案的上传、下载:管理软件可以将网络中各个节点的所存储的控制方案上传到上位机,也可以将控制方案通过CAN总线下载到各个节点中去。
3)实时监测系统各个回路的状态:系统通过CAN接口卡可以实时监测CAN总线上传送的各种命令,并可以在上位机上显示出各个回路的开关状态。
4)控制系统各回路的开关状态:用户可以通过管理软件向系统中其它节点发送控制命令,控制系统中任意回路的开关。
上位机管理软件采用组态技术和图形化编辑界面,用户可以通过组态方式或者通过表格方式建立、修改控制方案。管理软件也通过图形方式实时显示系统中各个回路的状态的。