1. 脉冲雷达
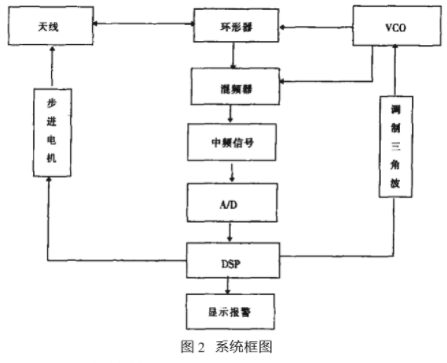
脉冲测距的原理(如图1所示)是通过判断发射脉冲信号与目标反射脉冲信号之间的时间差τ,结合毫米波的传播速度,计算两车的间距R[3]。
![]()
脉冲测距方式原理虽然简单,主要是判断发射信号和反射信号之间的时间差,但是在具体的技术实现上存在一定的难度。主要问题在于:对于脉冲雷达系统,当目标距离很近时,发射脉冲和接收脉冲之间的时间差非常小,这就要求系统采用高速信号处理技术,从而使近距离测距变得十分复杂,成本也大幅上升。因此该方式实用性不强。
2. 调频连续波(FMCW)雷达
与脉冲雷达相比,FMCW具有所需发送功率低,信号处理复杂程度低及成本低廉的显著优点。目前在汽车防撞研究中得到广泛的应用和研究。因此,本文将重点介绍调频连续波(FMCW)雷达。
1)测距原理
雷达系统通过天线向外发射一列连续调频毫米波,并接收目标的反射信号。发射波的频率随时间按调制电压的规律变化。反射波与发射波的形状相同,只是在时间上有一个延迟τ,τ与目标距离R的关系同样可用式(1)表示。
2)测速原理
如果反射信号来自一个相对运动的目标,则反射信号中包括一个由目标的相对运动所引起的多普勒频移fd。
根据多普勒原理,目标的相对运动速度可用式(2)表示:

四.基于DSP的汽车防撞探测技术
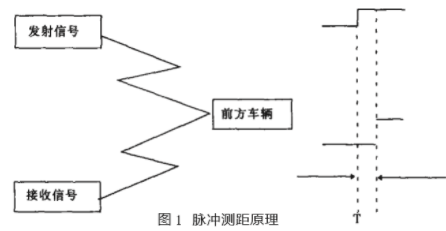
车载微波探测雷达设计的目的就是及早探测到路况复杂、能见度差的地段上有潜在的危险目标,将测得的信息转换为指令,为驾驶员提供减速、制动、转向、停车等警示信息。由于车辆行驶过程中雷达接收的信号十分复杂,包含多种杂波成分,需要进行大量复杂的数字信号处理运算,对雷达视域内的多个目标进行检测、分类、识别、跟踪,同时报警,所以考虑采用高性价比的DSP芯片来完成。该系统可分为两个部分组成:FMCW前端和DSP单元。FMCW前端将安装在车辆的外面,DSP单元则安装在驾驶员旁边,两者用隐蔽的电线相连,不影响车辆的性能和外观,方便实用。
整个系统框图如图2所示: