表1. 传感器的优势/局限
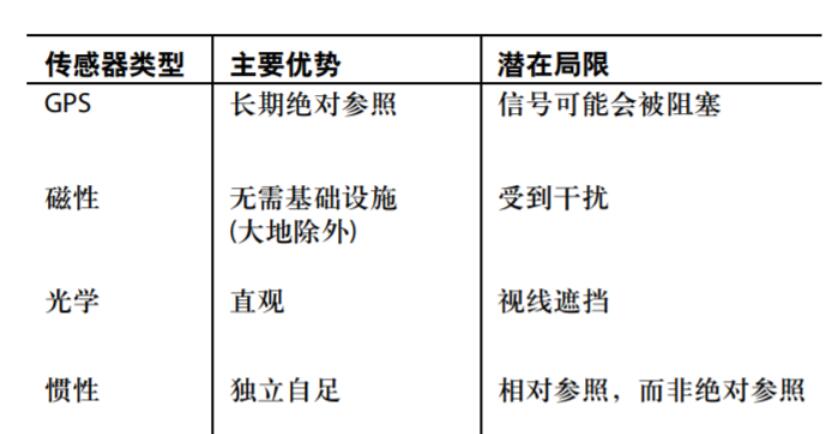
传感器的选择与处理
除了解决最简单的问题外,大多数解决方案都依靠多种类型的传感器来提供各种条件下所需的精度与性能。惯性传感器,例如基于微机电系统(MEMS)的加速计和陀螺仪,有潜力完全弥补其它传感器类型的缺点,因为此类传感器可以避免诸多干扰,而且不需要外部基础设施(无需卫星、磁场、相机…只需要惯性)。
MEMS惯性传感器可靠性高(在汽车行业拥有20年的应用历史),功耗低,尺寸小,它在手机和视频游戏领域的成功应用充分表明,它具有很强的商业吸引力。然而,不同器件的性能水平大不相同,适合游戏的器件并不能解决先前所述的高性能导航问题。例如,精密工业和医疗导航所需的性能水平通常比消费电子设备所用MEMS传感器的性能水平高出一个数量级。
在大多数情况下,器件的运动较为复杂(超过一个轴),因此需要使用全惯性测量单元(IMU)。IMU可集成多达6自由度的惯性运动检测——三个线性自由度、三个旋转自由度(见图2)。
例如,ADI公司的ADIS16334 iSensor IMU具有解决大多数工业导航问题所需的集成度和性能,设计紧凑,适用于众多工业仪表及车辆(见图1)。很多情况下还能集成4个或4个以上的额外自由度,包括三轴磁性检测、单轴压力(高度)检测。
图1. 6自由度运动检测,采用11 mm × 22 mm ×33 mm封装
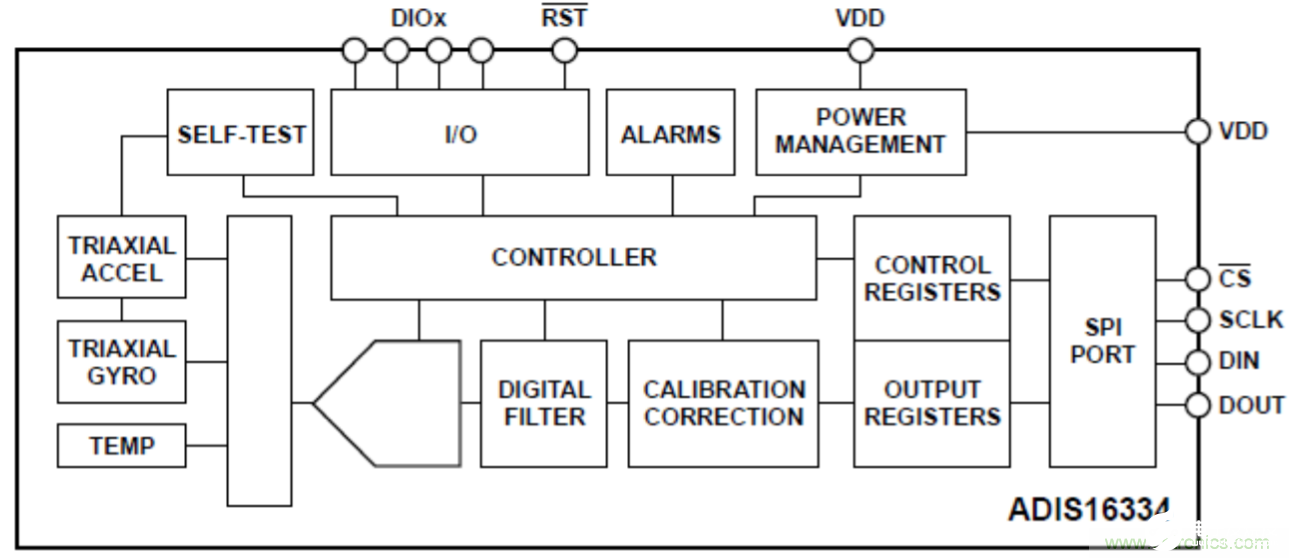
图2. 惯性测量单元捕捉复杂多轴运动
正如此前所描述的,任何类型的传感器都有其局限性,如果这些局限性对系统性能目标产生影响,设计人员可以在采用补偿技术的同时合并多种类型的传感器。例如,惯性测量单元输出高度稳定的线性和旋转传感器值,可对下列影响进行补偿:
• 温度和电压漂移
• 偏置、灵敏度和非线性度
• 振动
• X、Y、Z轴对准误差
惯性传感器的质量不同,漂移度也不同,有时也可使用GPS或磁力计来纠正该漂移。除了良好的传感器设计外,导航应用的核心挑战在于确定要依靠哪些传感器以及何时依靠这些传感器。惯性MEMS加速计和陀螺仪的应用已证明,它们是良好的补充手段,有助设计人员设计出功能完善的检测系统。
使用MEMS惯性传感器进行设计