苹果新款iPad Pro激光雷达发射的激光红外点阵
苹果新款iPad Pro激光雷达的dToF传感技术分为两种工作模式,分别为“正常工作模式”和“省电模式”,图4(a)为“正常工作模式”,投射出的激光红外点阵共计576个,而图4(b)为“省电模式”,投射出的激光红外点阵仅有144个点。另外需要指出的是,上述激光红外点阵中的点并不是同时都发光的,使用高速相机(近红外敏感)拍摄时,投射出的激光红外点阵中的点会交替发光,如图5所示。
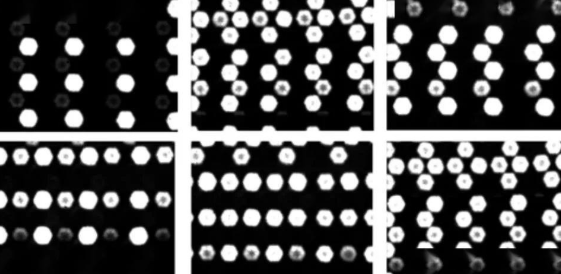
使用高速相机拍摄苹果新款iPad Pro激光雷达投射出的激光红外点阵(瞬时图)
经过仔细测试苹果新款iPad Pro激光雷达的“正常工作模式”,发现投射出的激光红外点阵分为四组,轮流发光。如果取图4(a)中的一块单元区域为例,则发光顺序如图6所示。
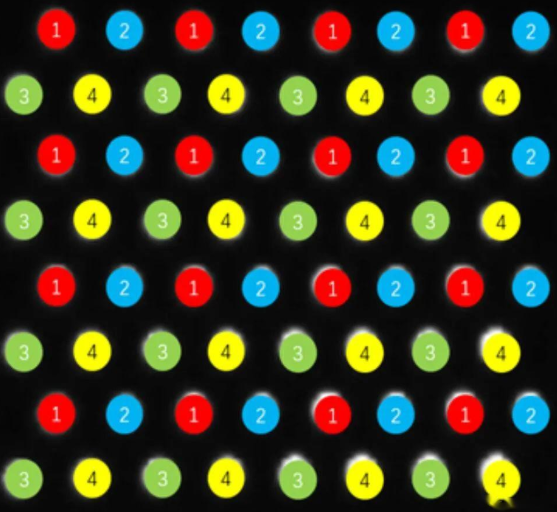
苹果新款iPad Pro激光雷达投射出的激光红外点阵(部分)工作顺序图
在图中,我们采用不同的颜色标记了激光红外点阵的发光顺序,可以看到在每一行,发光的顺序为“1-2-1-2”重复或者“3-4-3-4”重复。这也是源自于特殊的VCSEL设计。据悉,这款VCSEL是由Lumentum提供,整个VCSEL采用共负极设计,正极有四个区域,驱动信号可以分别控制正极四个区域中的一个。VCSEL部分的结构图如图7所示。
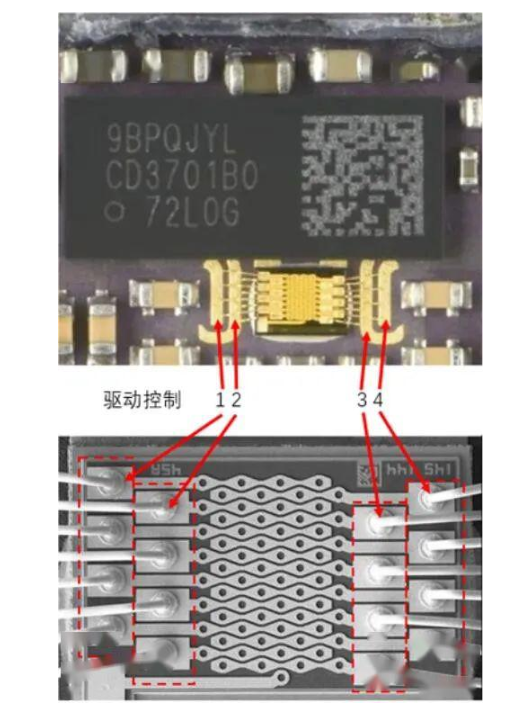
苹果新款iPad Pro激光雷达中的VCSEL及驱动控制示意
由图可以看到VCSEL:(1)每一行有4个发光点,共计16行;(2)根据正极区域分四组,每组16个发光点。因此,VCSEL共计64个发光点。然而激光雷达在“正常工作模式”时,实际投射出的激光红外点阵却是576个点。为什么呢?
这是因为在发射端采用了“VCSEL+DOE”的搭配,从而在上、下、对角线三个方向分别产生了±1级的衍射,将VCSEL的一个发光点扩展为了9个。从图8可以看到,除了红色方框内为原本的0级、±1级衍射之外,其余的光点均为DOE衍射产生。