
其中 c表示光速。ToF相机的主要工作是估算发射光信号和反射光信号之间的延迟。
目前存在多种不同的测量∆T的方法,其中两种最为常用:连续波(CW)方法和脉冲方法。
连续波方法
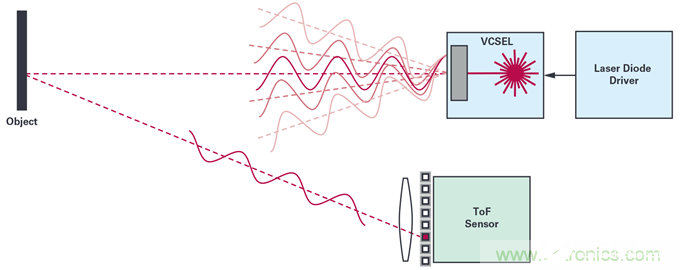
图3. 连续波ToF系统图解
连续波方法采用周期调制信号进行主动发光(图3),然后对接收到的信号进行零差解调,以测量反射光的相移。
例如,当发射信号使用正弦调制是,可以表示为如下公式:

其中
● As表示信号的幅度
● Bs 表示信号的偏置量
● fmod 表示调制频率, fmod – 1/Tmod 其中 Tmod 表示调制周期。
接收信号 r(t)是反射信号经过延迟和衰减得到的:

0 ≤ α 《 1,α是衰减系数,其值取决于目标距离以及表面反射率,∆T表示返回信号的延迟时间。
连续波飞行时间传感器通过按照相同的频率s(t) 对接收信号 r(t))和解调信号 g(t) 之间的相关函数进行采样,以此测量每个像素的距离。在理想情况下,解调信号也是一个正弦波:

像素执行的操作为相关运算:

当发射信号和解调信号都是正弦波时,相关值作为延迟τ 的函数应用到解调信号中:


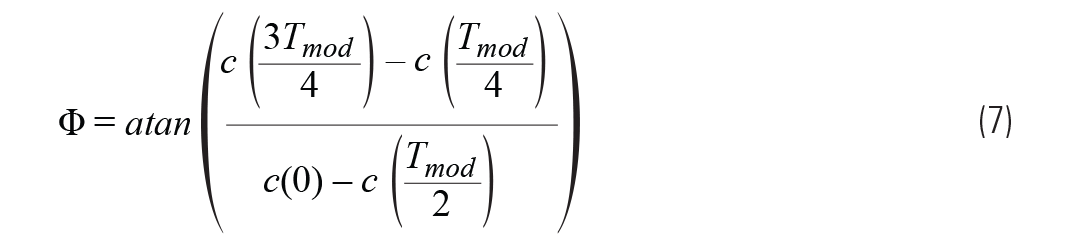
之后,如公式3所示,在每个四分之一周期内,对相关函数 c(τ)采样(通过90°步进改变发射光信号相位)。对于发射信号和解调信号之间的相位偏置Φ=2πfmodΔT,可以使用公式7估算:
深度则与相移成正比:

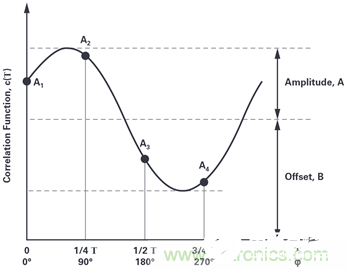
图4. 相关函数采样过程图解。