因此,采用MC9S12DG128芯片作为主控制器可以充分利用其片上资源丰富、采集和处理数据速度快的优点,从而可以实现复杂的算法及准确的估算SOC,有效解决基于传统单片机的电池管理系统资源有限,算法简单的问题。
1.2通信接口设计
在本系统中,CAN总线智能节点电路由MC9S12DG128内置模块CAN控制模块,CAN总线驱动器PCA82C250和高速光耦6N137,可实现数据在CAN总线的通信。其设计图如2所示。
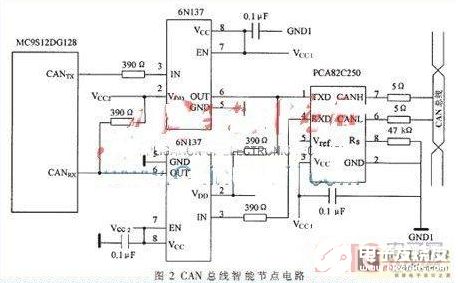
PCA82C250作为CAN协议控制器和物理总线间的接口,满足汽车中高速通信速率1 Mb/s[3]的设计要求。具有对总线提供差动发送能力,及对CAN控制器提供差动接收的能力,符合ISO11898[4]标准。PCA82C250还具有抗汽车环境中的瞬间干扰、保护总线能力,其斜率控制可降低射频干扰(RFI)。作为差分接收器,能够抗宽范围的共模干扰和电磁干扰(EMI)。
1.3 均衡模块的设计
当电动车电池组由多个单体电池串联使用时,即使单节电池的性能优良,但由于配组使用的各单体电池特性不一致,会导致电池组内部各单体电池过充和过放情况的严重不一致,从而影响整个电池组的品质[5]。
为解决上述问题,典型的方法是利用发热电阻旁路分流均衡法。即为每节单体电池配备一个放电平衡电阻,当某电池电压高于其他电池超过设定值时,MCU控制的多路开关闭合,此节通过放电平衡电阻分流,使电池电压下降,如此反复循环使得电池组各单体电池能平衡充电。
1.4 安全模块的设计
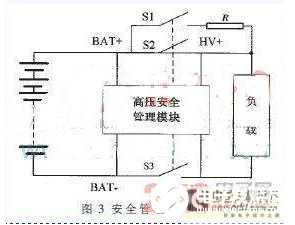
电动汽车动力电池组的总电压一般在300 V以上,因此安全控制模块是必不可少的[6]。
图3所示中安全管理器主要有4个参数:BAT+、BAT-、HV+、HV-,管理着三个继电器S1、S2、S3,R为预充电电阻。此系统主要通过测量以上4个参数的变化来判断电池安全情况,通过开关继电器进行管理。利用正负母线对地的接地电阻产生的漏电流,来测量母线对地的接地电阻大小,从而判别母线的接地故障。这一技术无需在母线上叠加任何信号,对直流母线供电不会有任何不良影响,并且可以彻底根除由母线对地分布电容所引起的误判与漏判。
2 SOC的预测
电池荷电状态SOC是描述电池状态的重要参数。进行SOC预测的方法主要有开路电压法、负载电压法、Ah法及直流内阻法等。如果有足够的数据,还可以用自适应的控制计算方法建立电池模型[7]。本设计以Ah法为主,配合负载电压法和内阻法对SOC进行估测。电池充放电容量与充放电电流i的关系为: