以模拟量控制板为操作对象,通过ADC0809采集模拟量输入信号(0-10V或4-20mA),经单片机处理数据后利用TLC5620输出该信号(0-10V或4-20mA),要求数据处理分别采用P调节、PI调节。
各个环节的作用
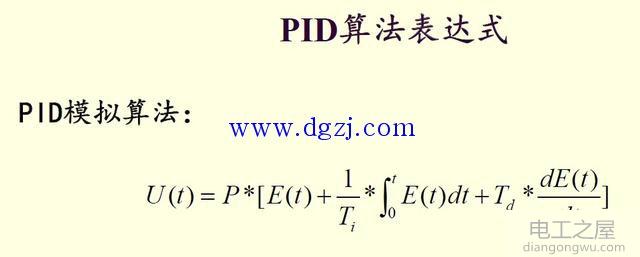
PID控制包括三个环节:比例、积分、微分环节,对应的参数分别为P、Ti 、Td,这三个环节在控制系统中起到不同的作用。
比例调节作用:按比例反应系统的偏差,系统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差。比例作用大,可以加快调节,减少误差,但是过大的比例,使系统的稳定性下降,甚至造成系统的不稳定。
积分调节作用:使系统消除稳态误差,提高无差度。因为有误差,积分调节就进行,直至无差,积分调节停止,积分调节输出一常值。积分作用的强弱取决与积分时间常数Ti,Ti越小,积分作用就越强反之Ti大则积分作用弱,加入积分调节可使系统稳定性下降,动态响应变慢。
微分调节作用:微分作用反映系统偏差信号的变化率,具有预见性,能预见偏差变化的趋势,因此能产生超前的控制作用,可以改善系统的动态性能。在微分时间选择合适情况下,可以减少超调,减少调节时间。微分作用对噪声干扰有放大作用,因此过强的加微分调节,对系统抗干扰不利。
注意:对于滞后很小或噪声严重的系统,应避免引入微分作用,否则会由于被控系统的快速变化引起控制作用的大幅度变化,严重时会导致控制系统不稳定。
PID调试步骤
A、确定比例增益P确定比例增益P 时,首先去掉PID的积分项和微分项,一般是令Ti=0、Td=0,使PID为纯比例调节。输入设定为系统允许的最大值60%~70%,由0逐渐加大比例增益P,直至系统出现振荡;再反过来,从此时的比例增益P逐渐减小,直至系统振荡消失,记录此时的比例增益P,设定PID的比例增益P为当前值的60%~70%。比例增益P调试
完成。
B、确定积分时间常数Ti
比例增益P确定后,设定一个较大的积分时间常数Ti的初值,然后逐渐减小Ti,直至系统出现振荡,之后再反过来,逐渐加大Ti,直至系统振荡消失。记录此时的Ti,设定PID的积分时间常数Ti为当前值的150%~180%。积分时间常数Ti调试完成。
C、确定微分时间常数Td
积分时间常数Td一般不用设定,为0即可。若要设定,与确定P和Ti的方法相同,取不振荡时的30%。
D、系统空载、带载联调,再对PID参数进行微调,直至满足要求。