无刷电动机原理是什么?直流无刷电动机是什么原理
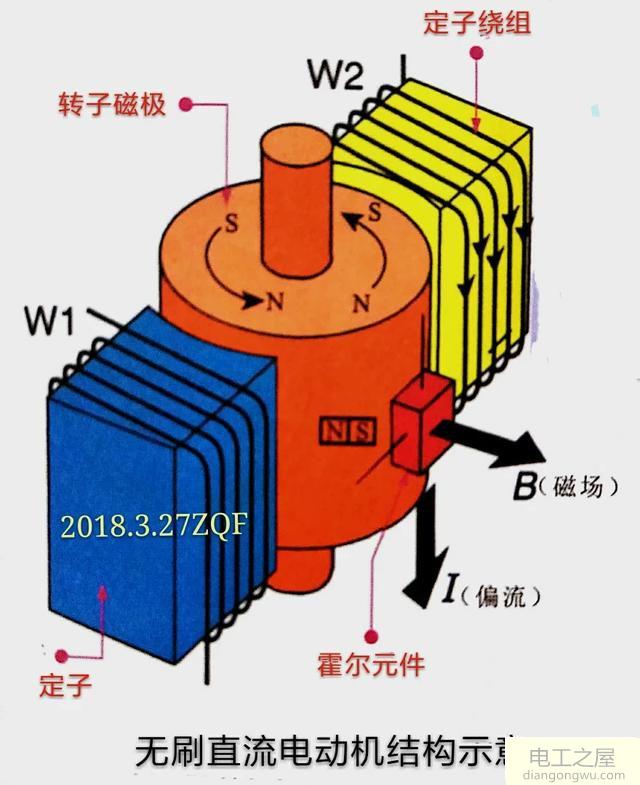
直流无刷电动机是采用晶体管换向技术,来代替了传统的整流子换向器一种新型直流电动机。它的结构图如下图所示。
它的工作原理如下;
无刷直流电动机定子绕组必须根据转子的磁极方位切换其中的电流方向,才能使转子连续旋转,因此在无刷直流电动机内必须设备一个转子磁极位置的传感器,这种传感器通常采用霍尔元件。 霍尔元件是一种磁感应传感器,可以检测磁场的极性,将磁场的极性变成电信号,送给对应的晶体管的控制极。定子绕组中的励磁电流是根据霍尔元件的信号进行切换,这样就可以形成旋转磁场,驱动转子旋转。 霍尔元件上下经限流电阻接到直流电源上,有偏流流过使晶体管按照对应方向截止或导通。(如上图所示),这样在定子W1线圈与定子w2定子线圈中,它受霍尔元件变化检测的信号而改变,形成旋转运动。 一般霍尔元件安装在无刷直流电机靠近转子磁极的位置。
上述无刷直流电机结构中有两个死区,即当转子转到N、S极之间的位置为中性点,在此位置霍尔元件感受不到磁场,因而无输出,则定子绕组也会无电流,电机只能靠惯性转动,如果恰好电动机停在此位置,则会无法启动。为了克服上述问题,人们在实线中也开发出多种方式。如下图所示。
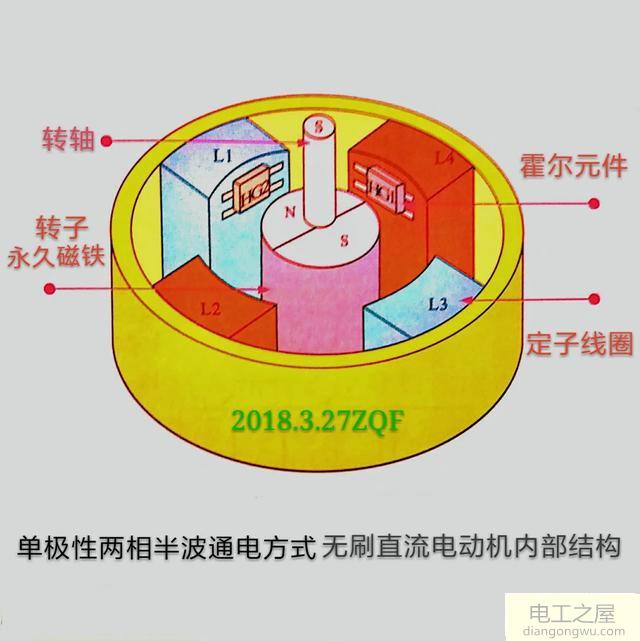
上面图为单极性两相半波通电方式,无刷直流电机的内部结构示意图。它在泡机中设有两霍尔元件按90度分布,转子为单极(N、S)永久磁钢,定子绕组为两相4个励磁绕组。下面为单极两相半波通电方式无刷电机电路示意图,分两张图片。
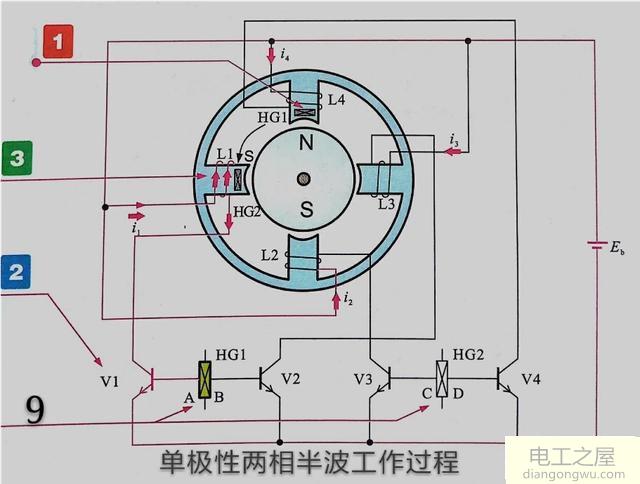
该类型的电机为了形成旋转磁场。
由4个晶体三极管Ⅴ1~V4驱动各自的绕组,转子位置的检测由两个霍尔元件担任。
①图中标注(红1)的指向。在转子磁极旋转过程中,当N极靠近霍尔元件HG1时,它会感应磁场信号,并转换成相应极性的电信号。
②霍尔元件A、B端输出左右极性相反的电信号,其中A端为正极、B端为负极,V1导通、V2截止。
③绕组L1中有电流,L2中无电流,L1产生的磁场S极会吸引N极,并排斥S极,使转子逆时针方向旋转。
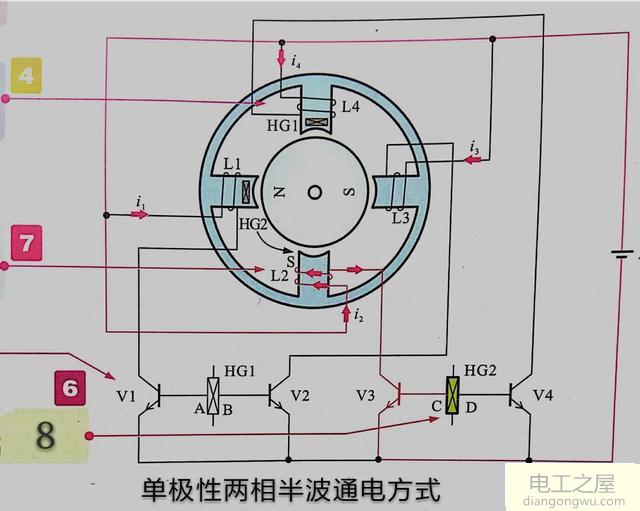
④指图中黑色9的指向。单极性两相半波通电方式的无刷直流电机为了形成旋转磁场,由4个晶体三极管V1~V4分别驱动各自的绕组,由两个霍尔元件对转子位置进行检测。
⑤霍尔元件HG1无任何信号输出时,V1、V2均为截止。
⑥转子的N极靠近霍尔元件HG2,HG2的C端输出正极性电压,D端输出负极性电压,V3导通。
⑦绕组L2中有电流,L2的上端产生S极,并吸引转子的N极继续旋转,如此循环,电动机就旋转起来了。
⑧当转子转动到90度时,HG1靠近转子的中性位置,HG1因靠近中性磁极而无输出。
⑨霍尔元件HG1无任何信号输出,V1、V2均截止。
上述就是无刷直流电机的工作原理。