1.电机最大速度选择
交流伺服电机额定速度一般在3000 rpm,最大转速为5000rpm。
机械传动系统要根据此参数设计。
2.电机定位精度的选择
机械传动比确定后,可根据控制系统的定位精度选择步进电机的步距角及驱动器的细分等级。一般选电机的一个步距角对应于系统定位精度的1/2 或更小。
注意:当细分等级大于1/4后,步距角的精度不能保证。伺服电机编码器的分辨率选择:分辨率要比定位精度高一个数量级。
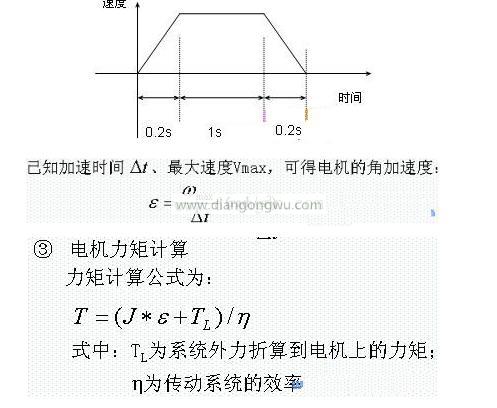
3.电机力矩选择
步进电机的动态力矩一下子很难确定,我们往往先确定电机的静力矩。静力矩选择的依据是电机工作的负载,而负载可分为惯性负载和摩擦负载二种。直接起动时(一般由低速)时二种负载均要考虑,加速起动时主要考虑惯性负载,恒速运行进只要考虑摩擦负载。一般情况下,静力矩应为摩擦负载的2-3倍内好,静力矩一旦选定,电机的机座及长度便能确定下来(几何尺寸)
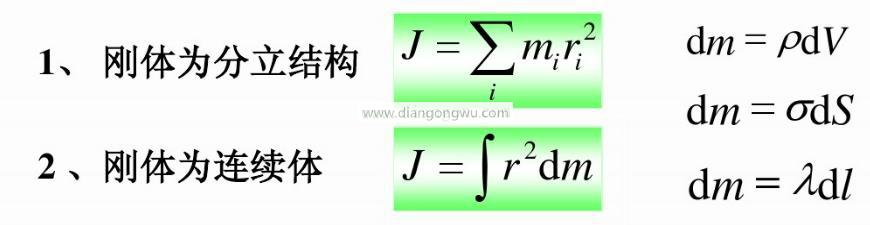
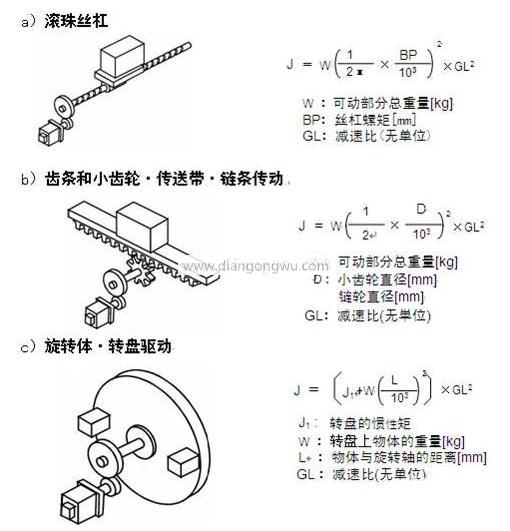
4、转动惯量计算
物体的转动惯量为:式中:dV为体积元,r为
物体密度,r为体积元与转轴的距离。单位:kgm2
将负载质量换算到电机输出轴上转动惯量,常见传动机构与公式如下: