今天小编要和大家分享的是接口,总线,驱动相关信息,接下来我将从采用CAN总线实现宝莱车驱动系统的设计应用,基于can总线系统进行控制的排爆机器人原理这几个方面来介绍。

接口,总线,驱动相关技术文章采用CAN总线实现宝莱车驱动系统的设计应用
CAN总线是一种串行数据通信协议,由于在数据通讯上具有突出的可靠性、实时性和灵活性,并可以非常有效地构成分布式控制/实时检测系统而得到了广泛应用。
随着人们对汽车动力性、操纵稳定性、安全性和舒适性的不断追求,现代汽车上安装了很多电子控制设备、电子部件、专用传感器和功能各异的执行装置。为了解决汽车电子系统控制中,许多动态信息资源共享、信息处理的实时性等问题,大多数中、高档汽车上都采用了CAN总线技术作为控制器联网手段。宝莱车的CAN总线具有高可靠性全面提高了宝莱车的动力性、经济性和安全性。
一、宝莱车CAN总线的组成与结构
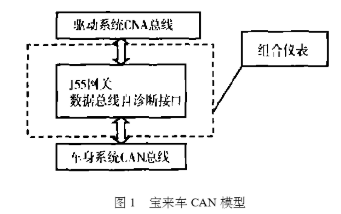
宝莱车采用两条CAN总线,即驱动系统CAN总线和车身系统CAN总线,这两总线完全能够满足ISO的定义。驱动系统CAN总线,其通信速率为500kbps,被称为高速CAN,其连接对象为汽车动力和传动机构的控制单元等。汽车发动机控制单元、自动变速器控制单元、ABS控制单元、安全气囊控制单元等。车身系统CAN总线,其通信速率为100kbps,被称为低速CAN或舒适系统CAN,其连接对象为中央控制器,4个门控制器等。此外宝莱车还有一个重要特征,便是在车身系统的CAN中引入了网络管理的概念。这对于事件触发性质的数据通信来说是非常合适的。
用于驱动系统的高速CAN和用于车身系统的低速CAN是两个相互独立的总线,但从资源共享的角度来看,它们之间最好有座连接桥梁,以使车身系统也能获得驱动系统的信息。当然,从传统思路来考虑,只要增加几根导线似乎就能解决问题。但从实际开发时,即在现有的控制器硬件上,要增加哪怕一个信号引出脚都将导致硬件的重新设计,往往成本和进度都不允许这么做。为了获得对方系统的信息,而又不涉及到硬件上的任何改动,宝莱车使用了网关—J533完成了此任务,宝莱车的网关是“寄生”在组合仪表内的如图1所示。