今天小编要和大家分享的是接口,总线,驱动相关信息,接下来我将从基于多任务信息流的CAN总线驱动设计,带有三个中央控制单元的can驱动网络这几个方面来介绍。

接口,总线,驱动相关技术文章基于多任务信息流的CAN总线驱动设计
μC/OS-II是美国人Jean Labrosse编写的一个免费的、源码公开的嵌入式实时内核。对于开发计算机嵌入式应用产品的技术人员来说是一个实用价值很高的实时嵌入式操作系统ERTOS(Embedded Real Time Operation System)。
要开发出完善的ERTOS,就要在多任务的调度和对I/O设备操作的稳定性、协调性方面做出大量的工作,这也是我在开发ERTOS过程中深深体会到的重点所在。希望本文能对开发ERTOS的技术人员在多任务信息流和I/O驱动方面有所启迪。
1 多任务信息流关键技术
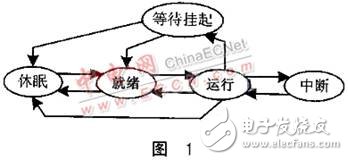
在讨论多任务信息流之前,先讨论一下多任务的工作状态。在μC/OS中,每个任务都是无限循环的,每个任务都处在以下五种状态之一:休眠态、就绪态、运行态、挂起态和中断态,如图1所示。
在多任务的调度和驱动程序的编写过程中,必然要涉及到公用代码段和共享存储区的保护问题。即使是原有的C函数,可重用性方面在没有得到理论和实践的验证情况下也需要对其进行保护。这样就需要合理的算法对公用代码段、共享存储区进行保护,避免操作系统在运行过程中产生重用性问题而导致运行结果不可预测。
系统在开发过程中,既要考虑到减少系统的复杂程度,也要兼顾其稳定性与运行效率的要求。这就需要我们对各种算法进行合理的选择:在稳定性可以保障的情况下,选择相对简单,占用CPU时间少的算法;在稳定性不能保障的情况下,考虑选择周全的算法。只有这样才能使操作系统在一定的配置环境下达到最高的运行效率。
接下来分别用void CanSendMessageProcess(void *data)、void CanSendMessage(void *data)、void CanReceiveMessageProcess(void *data)和void CanReceiveMessage(void *data)这四个任务来描述在采用消息队列、邮箱和信号量通信机制时的信息流的传递过程。
(1)消息队列通信机制
消息队列在初始化的时候,建立一个指定空间大小的数组,这个数组在使用的时候取得了环形缓冲区的概念。这个数组在运行期间不会被消除,这样就避免了重复建立数组的时候内存空间的泄漏问题。当一个任务向消息队列发送一个信息的时候,相应的指针加1(OSQIn+1),队列满时(OSQEntries = OSQSize),OSQIn则与OSQOut指向同一单元。如果在OSQIn指向的单元内插入新的指向消息的指针,就构成FIFO(First-In-First-Out)队列。相反,如果在OSQOut指向单元的下一个单元插入新的指针,就构成LIFO队列(Last-In-First-Out)。在本实例中,我们定义FIFO队列。消息指针总是从OSQOut指向的单元取出。OSQStart和OSQEnd定义了消息指针数组的头和尾,以便在OSQIn和OSQOut到达队列的边缘时,进行边界检查和必要的指针调整,实现其循环功能。