可控硅整流工作原理
一、单相半波可控整流电路
1、工作原理
电路和波形如图1所示,设u2=U2sinω。
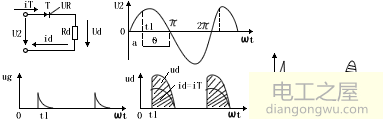
图1 单相半波可控整流
正半周:
0<t<t1,ug=0,T正向阻断,id=0,uT=u2,ud=0
t=t时,加入ug脉冲,T导通,忽略其正向压降,uT=0,ud=u2,id=ud/Rd。
负半周:
π≤t<2π当u2自然过零时,T自行关断而处于反向阻断状态,ut=0,ud=0,id=0。
从0到t1的电度角为α,叫控制角。从t1到π的电度角为θ,叫导通角,显然α+θ=π。当α=0,θ=180度时,可控硅全导通,与不控整流一样,当α=180度,θ=0度时,可控硅全关断,输出电压为零。
2、各电量关系
ud波形为非正弦波,其平均值(直流电压):

由上式可见,负载电阻Rd上的直流电压是控制角α的函数,所以改变α的大小就可以控制直流电压Ud的数值,这就是可控整流意义之所在。
流过Rd的直流电流Id:

Ud的有效值(均方根值):
流过Rd的电流有效值:

由于电源提供的有功功率P=UI,电源视在功率S=U2I(U2是电源电压有效值),所以功率因数:

由上式可见,功率因数cosψ也是α的函数,当α=0时,cosψ=0.707。显然,对于电阻性负载,单相半波可控整流的功率因数也不会是1。
比值Ud/U、I/Id和cosψ随α的变化数值,见表1,它们相应的关系曲线,如图2所示
表1 Ud/U、I/Id和cosψ的关系
| α | 0° | 30° | 60° | 90° | 120° | 150° | 180° |
| Ud/U I/Id cosψ | 0.45 1.57 0.707 | 0.42 1.66 0.698 | 0.338 1.88 0.635 | 0.225 2.22 0.508 | 0.113 2.87 0.302 | 0.03 3.99 0.12 | 0 - 0 |
图2 单相半波可控整流的电压、电流及功率因数与控制角的关系
由于可控硅T与Rd是串联的,所以,流过Rd的有效值电流I与平均值电流Id的比值,也就是流过可控硅T的有效值电流IT与平均值电流IdT的比值,即I/Id=It/IdT。
二、单相桥式半控整流电路
1、工作原理
电路与波形如图3所示
图3、单相桥式半控整流
正半周:
t1时刻加入ug1,T1导通,电流通路如图实线所示。uT1=0,ud=u2,uT2=-u2。u2过零时,T1自行关断。
负半周:
t2时刻加入ug2,T2导通,电流通路如图虚线所示,uT2=0,ud=-u2,ut1=u2。u2过零时T2自行关断。
2、各电量关系
由图3可见,ud波形为非正弦波,其幅值为半波整流的两倍,所以Rd上的直流电压Ud:

直流电流Id:

电压有效值U:
电流有效值I:
功率因数cosψ:

比值Ud/U,I/Id和cosψ随α的变化数值见表2,相应关系曲线见图4
表2 Ud/U、I/Id、cosψ与α的关系表
| α | 0° | 30° | 60° | 90° | 120° | 150° | 180° |
| Ud/U I/Id cosψ | 0.9 1.112 1 | 0.84 1.179 0.985 | 0.676 1.335 0.896 | 0.45 1.575 0.717 | 0.226 1.97 0.426 | 0.06 2.835 0.169 | 0 - 0 |
图4、单相全波和桥式电路电压、电流及功率因数与控制角的关系
把单相全波整流单相半波整流进行比较可知:
(1)当α相同时,全波的输出直流电压比半波的大一倍。
(2)在α和Id相同时,全波的电流有效值比半波的减小倍。
(3)α相同时,全波的功率因数比半波的提高了倍。
三、整流电路波形分析
1、单相半波可控整流
(1)电阻性负载(见图1)
电阻性负载,id波形与ud波形相似,因为可控硅T与负载电阻Rd串联,所以id=id。
可控硅T承受的正向电压随控制角α而变化,但它承受的反向电压总是负半波电压,负半波电压的最大值为U2。
线路简单,多用在要求不高的电阻负载的场合。
(2)感性负载(不带续流二极管,见图5):
图5 电感性负载无续流二极管
电机电器的电磁线圈、带电感滤波的电阻负载等均属于电感性负载。
电感具有障碍电流变化的作用可控硅T导通时,其压降uT=0,但电流id只能从零开始上升。id增加和减少时线圈Ld两端的感应电动势eL的极性变化如图示。
当电源电压u2下降及u2≥0时,(https://www.dgzj.com/article/dianzi/)只要释放磁场能量可以维持id继续流通,可控硅T仍然牌导通状态,此时ud=u2。当u2<0时,虽然ud出现负值,但电流id的方向不变。
当电流id减小到小于维持电流IH时,可控硅T自行关断,id=0,UT=u2,可控硅承受反压。
负载电压平均值:

其中电感Ld两端电压的平均值为零。
电感Ld的存在使负载电压ud出现负值,Ld越大,ud负值越大,负载上直流电压Ud就越小,Id=Ud/Rd也越小,所以如果不采取措施,可控硅的输出就达不到应有的电压和电流。
(3)感性负载(带续流二极管,见图6):
图6 电感性负载有续流二极管
在负载上并联一只续流二极管D,可使Ud提高到和电阻性负载时一样,
在电源电压u2≤0时,D的作用有点:①把电源负电压u2引到可控硅T两端,使T关断,uT=u2;②给电感电流续流,形成iD;③把负载短路,ud=0,避免ud出现负值,使负载上直流输出电压ud提高。
负载电流为何控硅电流iT和二极管的续流iD之和,即id=iT+iD。当ωLd≥R时,iD下降很慢使id近似为一条水平线,所以流过T和D的电注平均值与有效值分别为:平均值:IdT=(θ/360°)Id;IdD=[(360°-θ)/360°]Id;有效值:IT=根号下(θ/360°)Id;ID=根号下[(360°-θ)/360°]Id
可控硅T开始导通后,如果电感Ld很大,iT的上升很慢,这就有可能导致触发脉冲消失时可控硅的电流还上升不到维持导通状态的维持电流,就是说,可控硅触发不了,为了使可控硅可靠触发,触发脉冲应该足够宽,或者在负载两端并联一只电阻,以利于加快iT的上升。