(1)步距角及步距误差 步距角是步进电动机的一项重要性能指标,它直接关系到进给伺服系统的定位精度,因此选择电动机也要选择步距角。步进电动机的实际步距角与理论步距角之间有误差,步距误差指一转内误差的最大值。影响步距误差的因素主要是齿和磁极的机械加上及装配精度。步进电动机通、断电一次,转过一个步距角。累积误差是指转子从任意位置开始,经任意步后,转子的实际转角与理论转角之差的最大值。转一周积累误差为零。步距误差通常为理论步距角的5%。
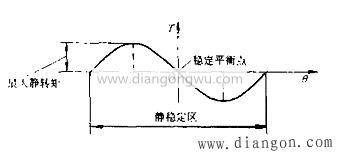
(2)静态矩角特性和最大静转矩 当步进电动机某相通电时,转子上受到的电磁转矩T称为静态转处于不动状态,这时转子上无转矩输出。如果在电动机轴上加一个负载转矩,转子按一定方向转过一个角度θ,重新处于不动(稳定状态),这时转子矩。它与负载转矩相等,转过的角度θ称为失调角,静态时T均θ的关系称为矩角特性,它近似于正正弦曲线。图1给出了单相距角特。
特性曲线上的电磁转矩最大值称为最大静转矩。在静态稳定区域内,当外转矩除去后,转子在电磁转矩的作用下.仍能回到稳定平衡点位置。最大静转矩表示步进电动机承受负载的能力。它越大,机带负载能力越强。运行的快速性和稳定性越好。
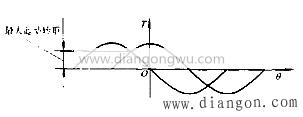
(3)最大起动转矩 电动机相邻两相的静态矩角特征曲线交点所对应的转矩即为最大起动转矩。当外界负载超过最大起功转矩时,步进电动机就不能起动,如图2所示。
(4)最大起动频率 空载时,步进电动机由静止状态起动、达到不丢步的正常运行的最高频串称为最大起动频率。它是步进电动机快速性能的重要指标。—般来说.负载转矩和转动惯量增加,起动频率下降。
(5)连续运行频率 步进电动机在最大起功频率以下起动后,当输入脉冲信号频率连续上升时,能不失步运行的最大输入信号频率,称为连续远行频率,该频率远大于最大起动频率。