式中,ax,ay,by,cx,cy,dx,dy,ex,ey,fx,fy是12个待确定的参数。
需要6组已知的点。为了精确,这里采用更多的点,用最小二乘法确定这12个参数。
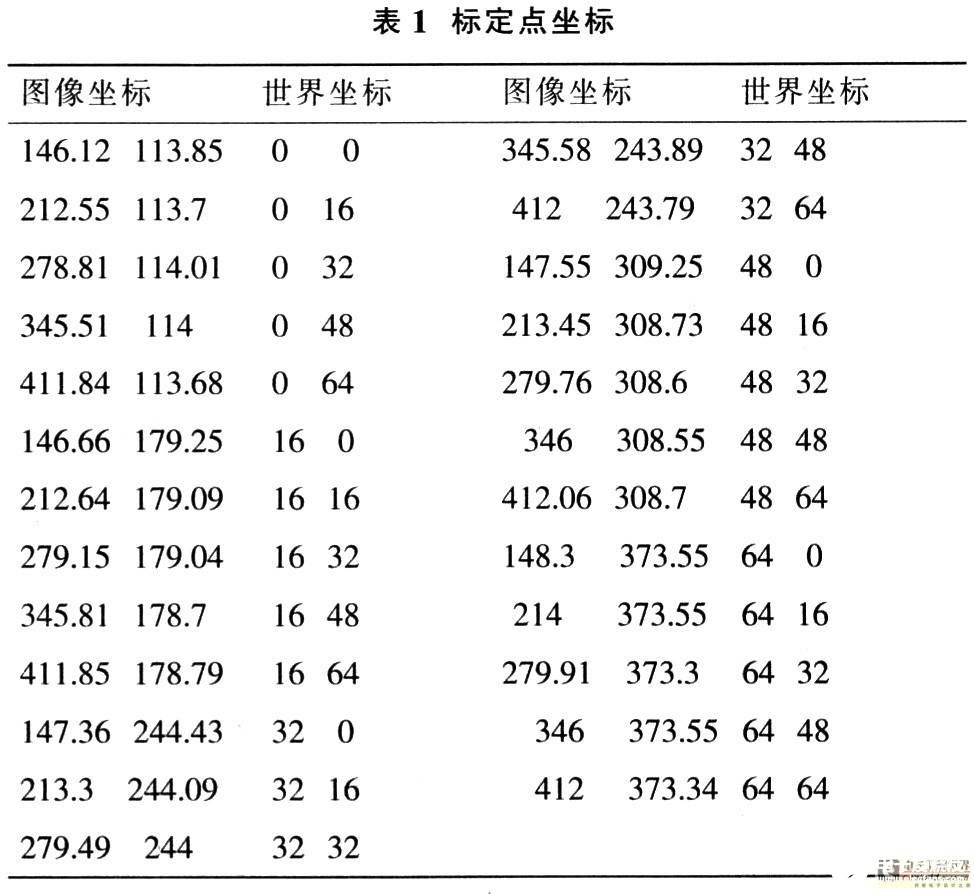
实验中选取25个点,应用灰度重心法提取标定点图像坐标,如图4所示,对应的世界坐标在定义的坐标系下是已知的,则得到表1。
用Matlab编程,求得:
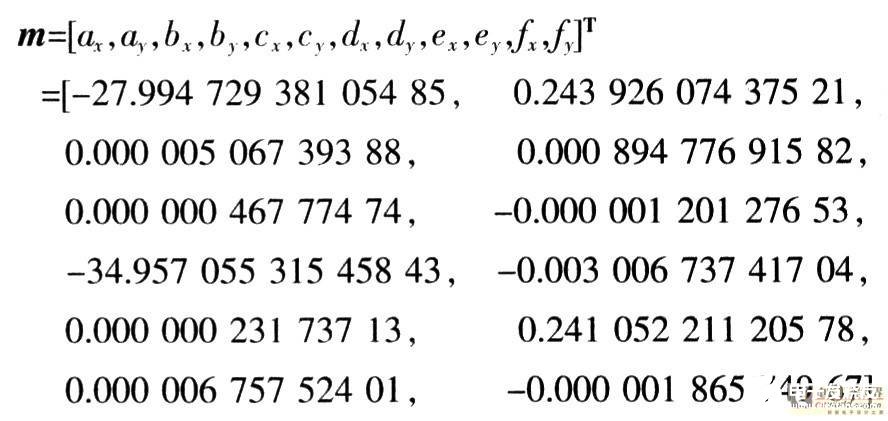
求得相机转换矩阵.便可由罔像上任意点的坐标得到实际坐标。
[page]
2.2 图像处理
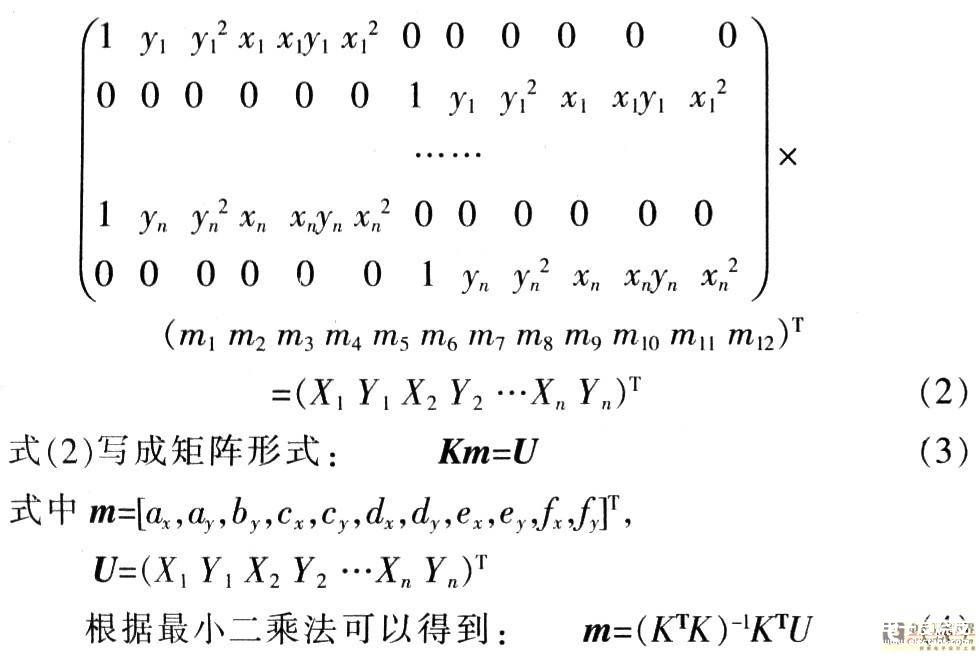
得到相机转换矩阵后,最重要的是得到两个激光断点处的图像坐标。实验中发现,采集的钢板图片中罔像较为黑暗区出现亮点,这些亮点属于噪声,需要进行中值滤波,以防止后面的点运算出错而得到错误的目标区域。
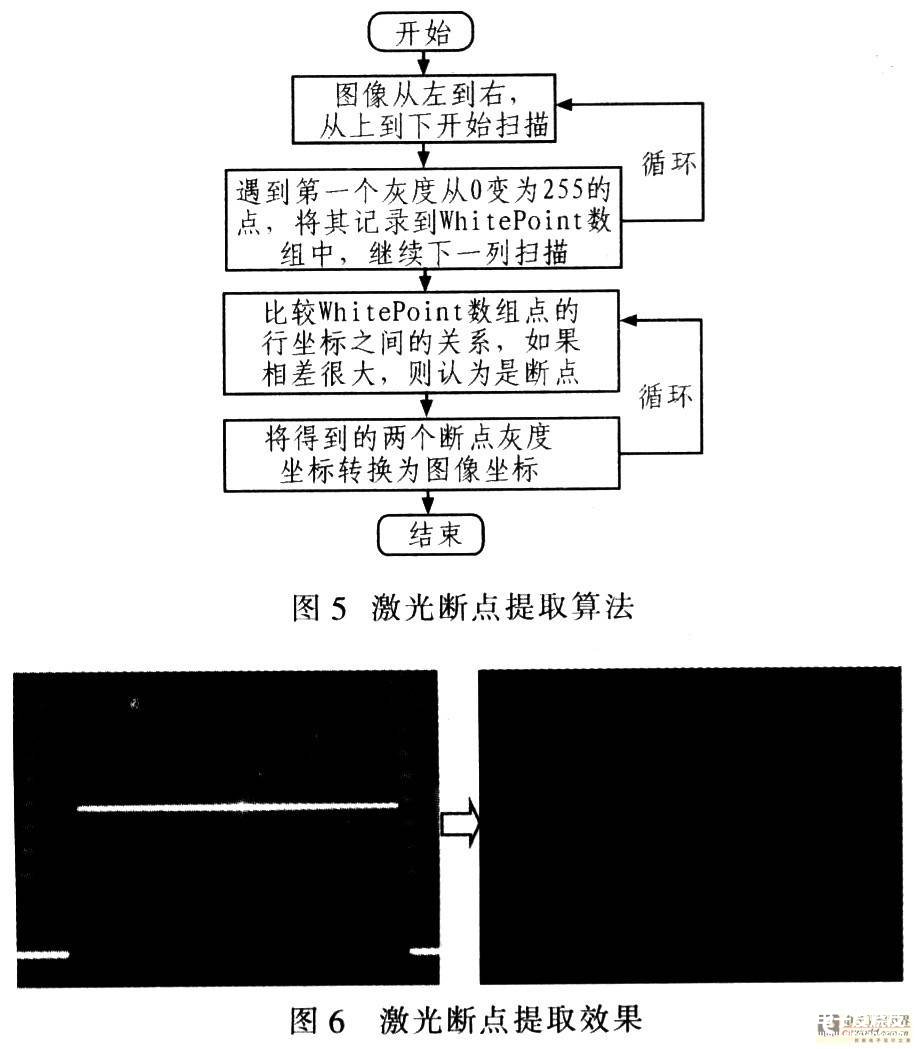
滤除噪声后,还需识别出激光线。激光线与背景区别较大,激光线的灰度值是255,而其他部分的灰度值远小于255。为有效识别出激光线,使激光线上的像素与其他部分像素的灰度值有非常明显的区别,选择阈值变换的处理方法,使激光线上的像素灰度值为255,其他部分的像素灰度值为0。便可提取钢板激光断点处的图像坐标,其算法如图5所示。