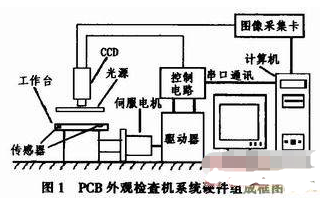
PCB在线检测系统结构复杂,其传动控制设备、电气控制系统和摄像机必须在计算机的精确控制下,才能协调处理工作,完成复杂的检测和分拣任务。基于机器视觉的PCB在线检测设备的结构如图1所示。
系统主要分为运动控制、图像采集和图像处理部分。图像采集部分是整个系统的重要组成部分。摄像机和镜头在机器视觉中相当于人的眼睛,负责拍摄对象的图像。图像采集部分是PCB检测系统的重要环节,也是检测处理的基础。PCB检测系统强调检测的速度和精度,所以需要图像采集部分及时、准确地提供清晰的图像。
2 、图像采集系统的硬件结构
1)图像采集系统工作原理
当系统上电后,MCU自动检测PCB载物台是否复位到起点。此过程主要有两个光纤传感器和伺服电机完成。两个传感器分别安装在四顾电机轨道的起点,即复位点和轨道端点。起复位,停止和电机反转的功能。上电后MCU检测到sesorl(复位点或起点处)无效,则调用电机反转程序,使PCB载物台回到起点位置,同时串口向PC机发送彩图无效信号。然后MCU继续判断是否有按键按下,如果有按键按下,电机开始正转,同时串口向PC机发送彩图有效信号。此过程也就是PCB线扫描过程,完成图像的采集。此过程电机经历三个阶段:加速阶段,匀速彩图阶段和减速停止阶段。在电机正转过程中,从七点开始,MCU通过特有的捕获比较单元(CCU6)来对伺服电机编码器反馈回来的脉冲计数,但计数值达到采图有效数值时,串口向PC发送采图开始信号,此时线阵CCD开始对PCB进行图像采集。在电机减速正转到轨道端点的传感器senor2处时,电机停止并马上反转回到起点处,此过程串口向PC机发送采图无效信号。至此一个完整的检测过程完整。MCU继续检测是否有按键按下来进行下一次检测。其中串口发送的采集有效和开始信号可以有效地避免误触发。CCD采集到的图像信号由Camrelink接口送至图像采集卡再由PC做进一步的图像处理。