如今的汽车雷达装置比手机还小,能探测您前方、后方或侧方的盲点位置是否存在大型障碍。但这还不够。
成像雷达
成像雷达的概念和实现更高水平的角度分辨率是一项理想功能,对于自动驾驶出租车来说尤其如此。高分辨率不仅支持物体检测(前面有东西),还支持物体分类(前面有自行车、汽车、人或小孩)。
为实现更高的分辨率,成像雷达利用高带宽信号处理、数字波束合成和相控阵技术。所有这些都依赖于大量的硬件和处理能力,其中天线尺寸随着所需的角度分辨率而缩放,通道计数增加以使用通道覆盖所需的天线区域。“只是投入更多昂贵的硬件来解决这一问题,是将更高分辨率作为解决方案的一种‘暴力’方式,”Chris Jacobs表示。
如今,ADI正与领先的OEM和一级供应商紧密合作,开发新的突破性方法,来改进雷达并应对其现代挑战。如今的汽车采用的雷达分辨率都不高,只能看到一团东西。它可以检测到汽车周围存在物体,可能是摩托车,可能是人或大型卡车,但无法确认该物体是什么。在硬件检测技术和软件算法进步的推动下,雷达的分辨率提高,能够分辨检测物体的属性,这让我们距离安全的全自动驾驶汽车又更近了一步。
分辨率问题和关于物体区分的挑战
现有的常规汽车雷达在大视场范围内提供大约10°到20°的水平角度分辨率。
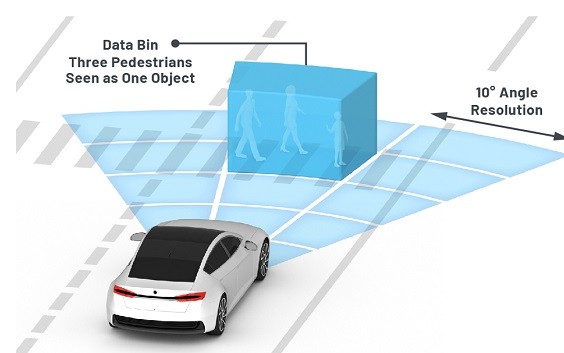
图1.低分辨率雷达和隐藏物体。现有的非成像雷达的角度分辨率一般在10°到20°,它会将3名行人看作一个物体。