3.1.3 A/D模块
A/D模块将舵机测试仪检测装置输出的反馈信号转化为数字量以便于计算机进行处理。系统的控制精度在很大程度上取决于检测反馈装置的精度。根据检测的反馈参数和系统性能指标要求,本设计中采用SBS公司的SysExpanModule/ADT600模数转换模块[2]。它是一个12位逐次逼近型快速A/D转换器,转换速度最大为15微秒。ADT600片内配有三态输出缓冲器电路,因而可以直接与各种典型的8位或16位处理器相连,而无须附加逻辑接口电路,且能与CMOS及TTL电平兼容。
3.1.4 俯仰、偏航和滚动控制信号测试
舵机测试中的最重要内容就是看执行俯仰、偏航和滚动控制信号测试的结果是否与理论的控制结果一致。导弹在主动段飞行过程中执行俯仰、偏航和滚动修正的是通过两对电动机的控制开关来改变姿态控制发动机的喷出燃气方向,所以该系统就必须采集4路电机开关的控制信号。ADT600集成了uPD71055可编程外围接口,用PA0~3来采集电动机的开关信号,采用1ms中断采集一次信号,最后将采集的控制信号与标准的控制信号进行比较,找出在切换时是否存在超前或滞后问题,以此来决定舵机性能的好坏。
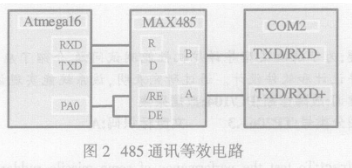
3.1.5 RS-485通信
本测试系统要与测试对象进行通信,为保证数据传输的可靠性,我们采用RS-485通信。系统在设计中采用两个串口COM1、COM2,其中COM2可通过跳线设置为RS485方式[3],其应用电路如图2所示。
4、 系统软件设计
系统测控软件完成下述功能:
(1)控制测试系统进行自检和故障诊断;
(2)控制数字I/O卡、A/D采样卡等进行数据采集;