首先执行的最高优先级的任务 Task1, Task1 会一直运行直到遇到系统阻塞式的 API 函数,比如延迟,事件标志等待,信号量等待,Task1 任务会被挂起,也就是释放 CPU 的执行权,让低优先级的任务得到执行。
FreeRTOS 操作系统继续执行任务就绪列表中下一个最高优先级的任务 Task2,Task2 执行过程中有两种情况:
Task1由于延迟时间到, 接收到信号量消息等方面的原因, 使得 Task1从挂起状态恢复到就绪态,在抢占式调度器的作用下,Task2 的执行会被 Task1 抢占。
Task2 会一直运行直到遇到系统阻塞式的 API 函数,比如延迟,事件标志等待,信号量等待, Task2任务会被挂起,继而执行就绪列表中下一个最高优先级的任务。
如果用户创建了多个任务并且采用抢占式调度器的话,基本都是按照上面两条来执行。 根据抢占式调度器,当前的任务要么被高优先级任务抢占,要么通过调用阻塞式 API 来释放 CPU 使用权让低优先级任务执行,没有用户任务执行时就执行空闲任务。
运行条件:
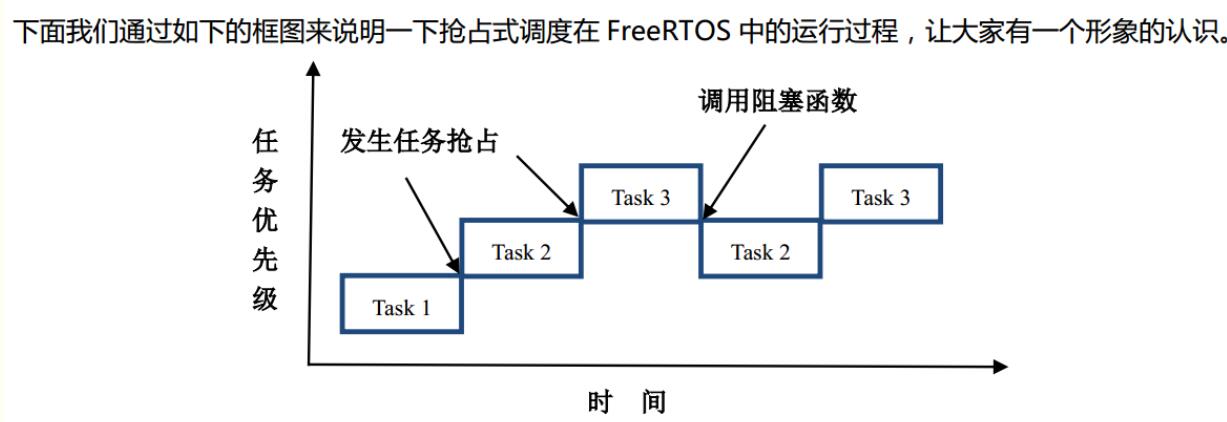
这里仅对抢占式调度进行说明。
创建 3 个任务 Task1,Task2 和 Task3。
Task1 的优先级为 1,Task2 的优先级为 2,Task3 的优先级为 3。 FreeRTOS 操作系统是设置的数值越小任务优先级越低,故 Task3 的优先级最高,Task1 的优先级最低。
此框图是 FreeRTOS 操作系统运行过程中的一部分。
运行过程描述如下:
此时任务 Task1 在运行中,运行过程中由于 Task2 就绪,在抢占式调度器的作用下任务 Task2 抢占Task1 的执行。 Task2 进入到运行态,Task1 由运行态进入到就绪态。