任务 Task2 在运行中,运行过程中由于 Task3 就绪,在抢占式调度器的作用下任务 Task3 抢占 Task2的执行。 Task3 进入到运行态,Task2 由运行态进入到就绪态。
任务 Task3 运行过程中调用了阻塞式 API 函数,比如 vTaskDelay,任务 Task3 被挂起,在抢占式调度器的作用下查找到下一个要执行的最高优先级任务是 Task2,任务 Task2 由就绪态进入到运行态。
任务 Task2 在运行中,运行过程中由于 Task3 再次就绪,在抢占式调度器的作用下任务 Task3 抢占Task2 的执行。 Task3 进入到运行态,Task2 由运行态进入到就绪态。
上面就是一个简单的不同优先级任务通过抢占式调度进行任务调度和任务切换的过程。
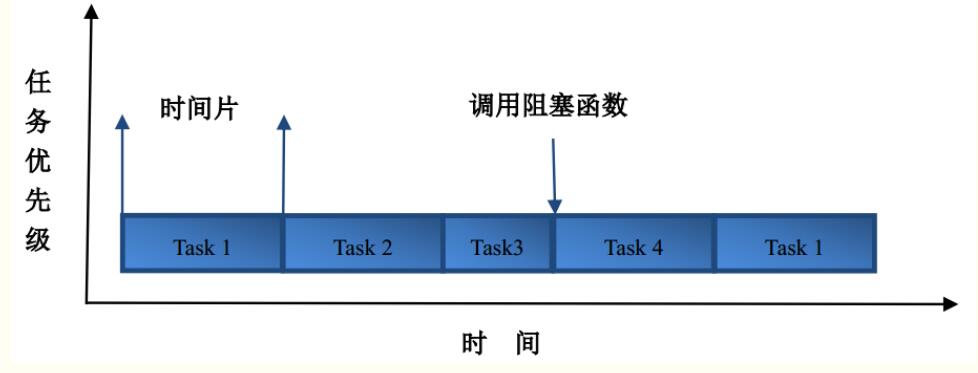
时间片调度器基本概念
在小型的嵌入式 RTOS 中,最常用的的时间片调度算法就是 Round-robin 调度算法。这种调度算法可以用于抢占式或者合作式的多任务中。另外,时间片调度适合用于不要求任务实时响应的情况。
实现 Round-robin 调度算法需要给同优先级的任务分配一个专门的列表,用于记录当前就绪的任务,并为每个任务分配一个时间片(也就是需要运行的时间长度,时间片用完了就进行任务切换)。
FreeRTOS 时间片调度器的实现在 FreeRTOS 操作系统中只有同优先级任务才会使用时间片调度,另外还需要用户在FreeRTOSConfig.h 文件中使能宏定义:
#define configUSE_TIME_SLICING 1默认情况下,此宏定义已经在 FreeRTOS.h 文件里面使能了,用户可以不用在 FreeRTOSConfig.h 文件中再单独使能。
下面我们通过如下的框图来说明一下时间片调度在 FreeRTOS 中的运行过程,让大家有一个形象的认识。