这种方式,有一个问题,就是对于实时性要求比较高的场合,显然这就是一个问题了。中断处理函数中,做了过多的事情,这显然是一个不合理的设计方案。
设置状态标志消抖
在上面的设想中,如果用到了rtos,那么我们可以在中断中读引脚电平,并且设置一个状态标志位,将线程资源释放给其他资源,等10ms后再次切换到这个线程,去读取按键的状态,如果状态一致,则认为按键按下,这显然是比第一种直接在中断中去读状态好了许多。
但是,也会存在随机的可能性,比如我们在移动设备的过程中,并不是人为操作的按键,但是恰好两次10ms都读到了触发中断的电平,这是极有可能的,虽然可能性比较小,但是对于产品而已,我们不能抱有侥幸心理,要解决这个问题。
多点采样方案消抖
于是,我们提出了多次取点采样的方案进行设计。
我们知道,机械按键触发了中断,无论是否人为操作,我们都需要去读取电平状态,我们用一个字节表示电平的状态,每一位代表一个采样点,则我们可以抽象出如下的模型:
如果我们每10ms采样一次,将这个采样的信号用一个字节的数据表示。
那么我们每次采样都往这个字节的最低位补充,直到这个数据变成全0或者全1为止。
下面是一个误触造成的抖动过程的抽象模型
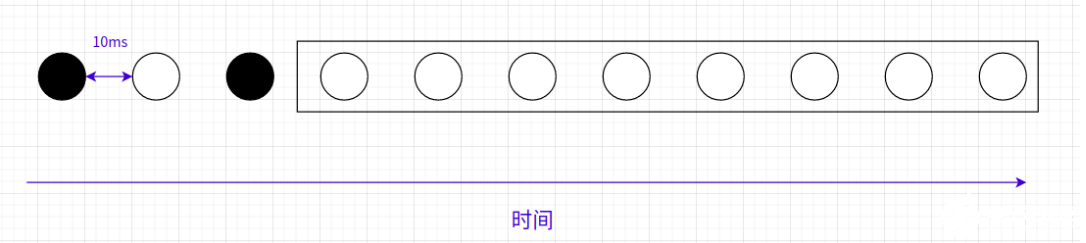
当进行采样的时候,黑色表示读到的是触发时的电平,白色表示未触发是的电平,当我们读到连续的都是白色的时候,则我们认为这次的采样是无效的。同理我们来看一下正常按下时的操作。
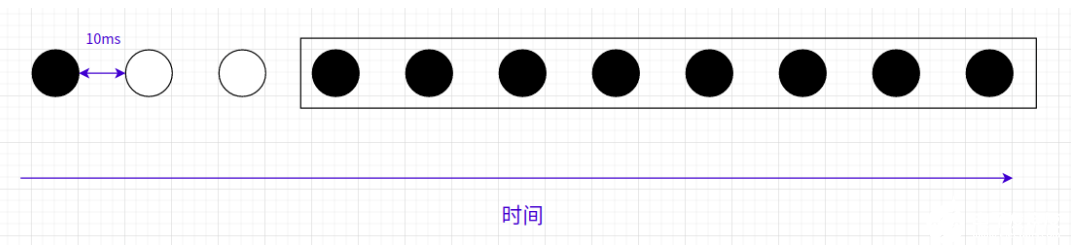
也是一个同理的过程,当我们读到0xFF是,则认为电平稳定有效,此时表按下状态。
从程序上表示如下:
//key_ptr 按键GPIO的引脚指针
//step_time采样间隔
//timeout 超时时间
KeyStatus key_val_get(volatile unsigned long *key_ptr, tu32 step_time, tu32 timeout)
{
static tu8 keybuf = 0xff;
KeyStatus keysta = key_Unstable;
rt_tick_t start_time = rt_tick_get,cost_time;
while(1)
{
cost_time = rt_tick_get - start_time;
if(cost_time 《 timeout)
{
rt_thread_delay(step_time);
keybuf = (( keybuf 《《 1 ) | (*key_ptr)) ;//每次读取按键值
if ( 0x00 == keybuf )
{
keysta = key_Low;