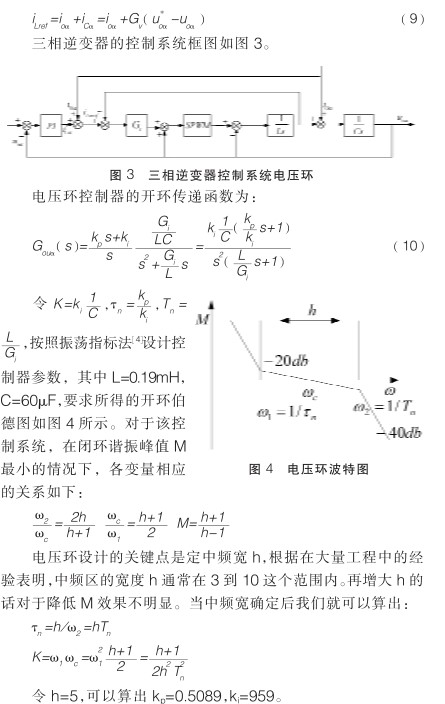
3 基于重复控制补偿的高精度PID控制
3.1 重复控制原理
重复控制是日本的lnoue 于1981 年首先提出来的,其原理来源于内模原理,加到被控对象的输入信号除偏差信号外,还叠加了一个“过去的控制偏差”,该偏差时上一周期该时刻的控制偏差。把上一次运行时的偏差反映到现在,和“现在的偏差”一起加到被控对象进行控制,这种控制方式,偏差重复被使用,称为重复控制。经过几个周期的重复控制之后可以大大提高系统的跟踪精度,改善系统品质。
重复控制中,一般期望重复控制作用在高频段的增益减小。为此,在重复控制中经常加入低通滤波器Q(s)。本控制方法取:
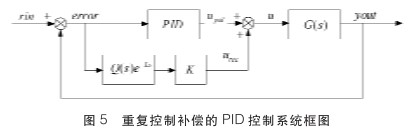
3.3 重复控制补偿的PID控制仿真及其结果
分析重复控制+双闭环PI在Simulink仿真中重复控制用的是Transport Delay模块,比例系数K取10,低通滤波器截至频率取1500Hz 即
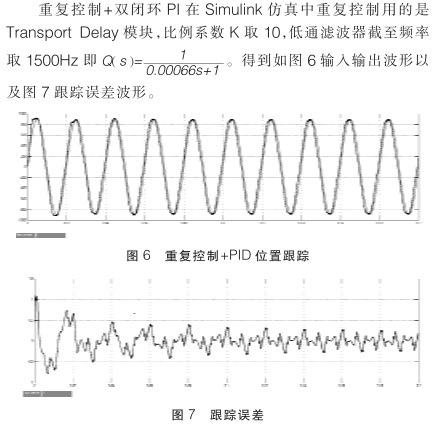
如图6,加上重复控制后从第3个周期开始输出信号yout跟能精确地跟踪输入信号rin,如图7,位置跟踪误差越来越小,在第4个周期误差不再减小。
4 双DSP+FPGA三相逆变器的硬件设计
双DSP+FPGA 控制系统功能如图8。
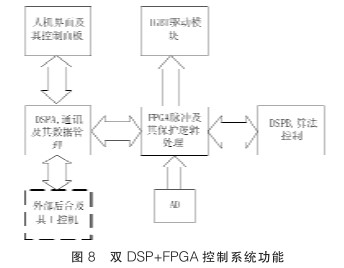
图8 为三相光伏逆变器的控制结构框图,逆变器的主控电路采用“双DSP+FPGA”结构,DSP 即数字信号处理器,采用Tl公司的TMS320F2812 芯片。FPGA 即现场可编程逻辑门阵列,采用XlLlNX公司的芯片。本设计采用的DSP芯片是一款定点型DSP,具有强大的数据运算能力,主频最高达150MHz,广泛应用于控制领域。FPGA具有强大的逻辑运算能力,能并行快速进行多组逻辑判断,根据DSP 和FPGA 的功能特点,作以下功能分配,两片DSP芯片分别为DSPA、DSPB。