今天小编要和大家分享的是控制,MCU相关信息,接下来我将从52单片机对智能小车的控制设计,智能小车这几个方面来介绍。

控制,MCU相关技术文章52单片机对智能小车的控制设计
引言:
随着电子技术、计算机技术和制造技术的飞速发展,消费产品呈现光、机、电一体化、智能化、小型化的趋势。各种智能化小车在市场玩具中占一个很大的比例。传统玩具的市场比重正在逐步缩水,高科技含量的电子玩具蒸蒸日上,日益成为电子玩具行业的发展主流。智能控制与传统控制有机的结合起来,取长补短,提高整体优势,更好地满足人们的需求。智能技术必将迎来它的发展新时代,因此,我们设计了这款智能小车。
1、机械部分总方案
在小车的机械要求保证预定的功能的前提下,我们还考虑到小车的经济、可靠、外形美观,性能好、富有时代特点。
转向机构与驱动系统的设计是至关重要的。为了保证小车转向时精确、灵敏、可靠性高且在转向时小车前轮纯滚动而无滑动,利用阿克曼原理及解析算法,设计出等腰梯形的双摇杆机构,小车的完美转向变为现实。
1.1、机械控制原理
在以单片机为核心的控制下,直流减速双电机驱动小车后轮,舵机通过等腰梯形双摇杆机构控制小车转向。
如图一所示:
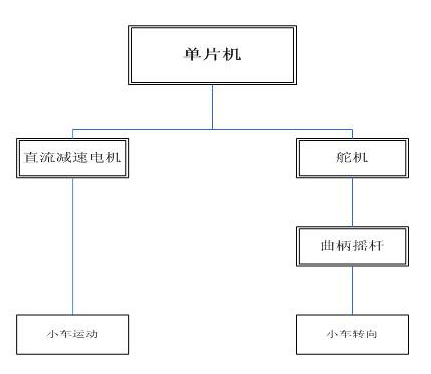
图一:机械控制原理图
1.2、阿克曼原理:
如图二所示:
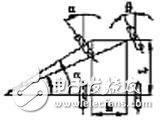
图二:阿克曼原理示意图
转弯时因轮距与轴距的关系,两前轮转角不同,内侧轮转向角比外侧转向角大,要使车辆转向顺利,车轮在地面纯滚动而不产生滑移,必须使所有车轮都绕同一瞬时转动中心滚动,两前轮转轴延长线与后轮轮轴延长线交与一点,这是阿克曼原理。此时,转向的内外轮转角关系为 :
ctgβ-ctgα=M/L
由解析法计算等腰梯形双摇杆机构连杆、连架杆长度:
已知连架杆AB的三个位置与连架杆CD的三个位置相对应,即三组对应位置为
,用解析法设计该四杆机构。