软起动器的控制方式选择,一般应按照以下三个原则考虑。
1、按负载类型(转矩与转速的关系)选择控制方式
选择软起动器的控制方式应首先考虑负载类型。要做到控制特性和负载特性匹配,这是最基本的要求。
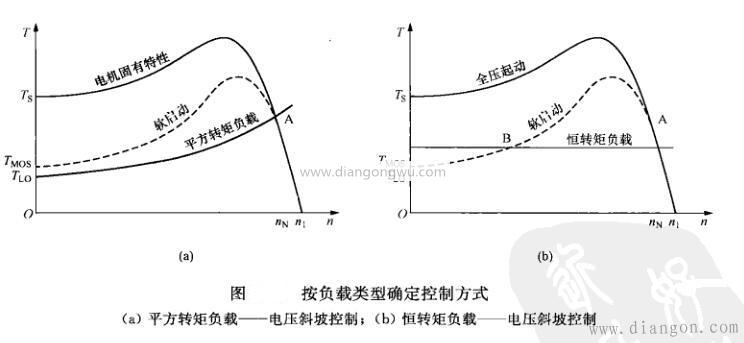
例如,对平方转矩类负载,由于通常惯性较大,且起动转矩随转速的提高而提高,起动之初不需要多大转矩,因此利用软起动装置起动这类设备,优先采用转矩控制方式,或选用电压斜坡控制、电流斜波控制等转矩曲线呈现双曲线形上升特征控制方式为宜,如图(a)所示。同样,对于比例转矩负载,也适用电压斜波或电流斜波等控制方式。对恒转矩类负载,宜选用电流限幅方式起动。若对恒转矩类负载采用电压斜波控制,则不太适合,如图(b)所示,起动的前半部分,电动机转矩低于负载转矩,电动机不能起动;后半部分,电动机转矩又大大超过负载转矩,造成转矩、电流冲击较大。
2、按负载设备工艺要求选择控制方式
软启动器控制方式的选择还应适合不同工业设备的工艺要求,这样才能使软启动器的性能得到更好的发挥;相反若选择不正确,反而带来一些列不良后果。
例如,软停车功能则可以很好地抑制水锤。但是在一般场合使用软停车功能除了没有必要还会浪费电能。又如,转速闭环控制功能适用于对起停车速度有较高控制要求的场合,由于需要使用和安装转速传感器,因此一般场合应用只会带来成本的提高和施工作业的麻烦。
3、按负载工作情况选择控制方式
有的控制功能还需要考虑负载工作情况。例如,轻载节能功能就不能随意使用。软起动器只有在变转矩负载(风机、水泵等)且低负载率运行的条件下才有较好的节电效果,不能不分对象的使用。对于恒转矩负载工作于较高负载率情况下,不仅无轻载节能效果,还增加了功耗,转子发热,寿命降低,同时对电网产生持续的谐波干扰。