PID控制又称比例微积分控制,是一种闭环控制。
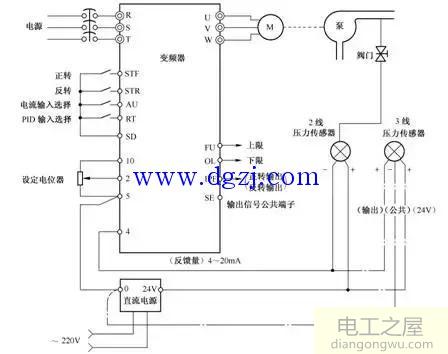
一种典型的PID控制应用电路
1.PID控制参数设置
| 参数及设置值 | 说明 |
| Pr.128=20 | 将端子4设为PID控制的压力检测输入端 |
| Pr.129=30 | 将PID比例调节设为30% |
| Pr.130=10 | 将积分时间常数设为10s |
| Pr.131=100% | 设定上限值范围为100% |
| Pr.132=0 | 设定下限值范围为0 |
| Pr.133=50% | 设定PU操作时的PID控制设定值(外部操作时,设定值由2-5端子间的电压决定) |
| Pr.134=3s | 将积分时间常数设为3s |
| 参数及设置值 | 说明 |
| Pr.183=14 | 将RT端子设为PID控制端,用于启动PID控制 |
| Pr.192=16 | 设置IPF端子输出正反转信号 |
| Pr.193=14 | 设置OL端子输出下限信号 |
| Pr.194=15 | 设置FU端子输出上限信号 |
设置外部操作模式。设定Pr.79=2,面板“EXT”指示灯亮,指示当前为外部操作模式。
启动PID控制。将AU端子外接开关闭合,选择端子4电流输入有效;将RT端子外接开关闭合,启动PID控制;将STF端子外接开关闭合,启动电动机正转。
改变给定值。调节设定电位器,2-5端子间的电压变化,PID控制的给定值随之变化,电动机转速会发生变化,例如给定值大,正向偏差(ΔX>0)增大,相当于反馈值减小,PID控制使电动机转速变快,水压增大,端子4的反馈值增大,偏差慢慢减小,当偏差接近0时,电动机转速保持稳定。
改变反馈值。调节阀门,改变水压大小来调节端子4输入的电流(反馈值),PID控制的反馈值变化,电动机转速就会发生变化。例如阀门调大,水压增大,反馈值大,负向偏差(ΔX
PU操作模式下的PID控制。设定Pr.79=1,面板“PU”指示灯亮,指示当前为PU操作模式。按“FWD”或“REV”键,启动PID控制,运行在Pr.133设定值上,按“STOP”键停止PID运行。