异步电动机的软起动工作原理
软起动是指运用串接于电源与被控电机之间的软起动器,控制其内部晶闸管的导通角,使电机输入电压从零以预设函数关系逐渐上升,直至起动结束,赋予电机全电压的起动方法。软起动器是一种集电机软起动、软停车、轻载节能和多种保护功能于一体的新颖电机控制装置,它的主要构成是串接于电源与被控电机之间的三相反并联晶闸管及其电子控制电路,通过运用不同的方法,控制三相反向并联晶闸管的导通角,使被控电动机的输入电压按不同的要求而变化,就可实现不同的功能。如图(一)所示。
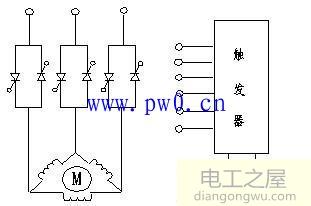
图(一)基本原理图
目前使用的软起动器,基本上是以单片机作为中央控制器控制核心来完成测量及各种控制算法,用程序软件自动控制整个起动过程。它通过单片机及相应的数字电路控制晶闸管触发脉冲的迟早来改变触发角的大小,从而改变晶闸管的导通时间,最终改变加到电动机三相绕组的电压大小。由于电动机转矩近似与定子电压的平方成正比,电流又和定子电压成正比。这样,电动机的起动转矩和起动电流的限制可以通过定子电压的控制来实现,而定子电压又是通过可控硅的导通相角来控制的,所以不同的初始相角可实现不同的端电压,电动机的起动转矩和起动电流的最大值可根据负载而设定,以满足不同的负载起动要求。电动机起动过程中,晶闸管的导通角逐渐增大,晶闸管的输出电压也逐渐增加,电动机从零开始加速,直到晶闸管全导通,从而实现电动机的无级平滑起动,并使电动机工作在额定电压的机械特性上。