1.常数写入禁止选择/常数初始化 (n01)
可禁止参数的写入及变更参数的设定/参照范围。并可将参数初始化为出厂设定。见表2-4-9。
表2-4-9 常数写入禁止选择/常数初始化
| 设定值 | 内 容 | 设定值 | 内 容 |
| 0 | 可设定和参照n01。n02~n79只可作参照 | 8 | 两相电源时的初始化 (恢复到出厂设定) |
| 1 | 可设定和参照n01~n79 | 9 | 3相电源时的初始化 |
| 6 | 只可清除异常内容的记忆 |
2.运转指令的选择 (n02)
变频器运转/停止方法的选择 (使用远程模式的运转指令方法)。见表2-4-10。
表2-4-10 远程指令选择
| 设定值 | 内 容 | 设定值 | 内 容 |
| 0 | 操作器的RUN键和STOP/RESET键有效 | 1 | 控制电路的端口区控制 (多功能输入) 有效 |
※ 本地模式中不接受操作器的键操作运转指令。
3.频率指令的选择 (n03)
选择变频器的频率指令输入方法 (使用远程模式的频率指令方法),见表2-4-11。
表2-4-11 频率指令的选择
| 设定值 | 内 容 | 设定值 | 内 容 |
| 0 | 操作器的频率指令旋钮有效 | 3 | 频率指令控制端子(4~20mA)有效 ※ |
| 1 | 频率指令1 (n21)有效 | 4 | 频率指令控制端子 (0~20mA) 有效 ※ |
| 2 | 频率指令控制端子(0~10V)有效 |
※ 电流输入时需要进行开关SW8的切换 (Ⅰ)。
4.停止方法的选择 (n04)
输入停止指令时的停止方法选择。见表2-4-12。
5.反转禁止选择 (n05)
输入反转指令时的动作选择。见表2-4-13。
6.STOP键有效/无效选择 (n06)
当运转指令的选择 (n02)设定为 “1” 时,选择是否通过操作器的STOP/RESET键使变频器停止 (远程模式时的有效/无效选择),见表2-4-14。
表2-4-12 停止方法的选择
| 设定值 | 内 容 |
| 0 | 减速停止 (在所选的减速时间内停止) |
| 1 | 自由运转停止 (通过停止指令切断输出) |
表2-4-13 反转禁止选择
| 设定值 | 内 容 |
| 0 | 可以反转 |
| 1 | 反转禁止 (不能反转) |
7.本地模式时的频率指令选择 (n07)
本地模式时,选择变频器的频率指令输入方法。见表2-4-15。
表2-4-14 STOP键有效/无效选择
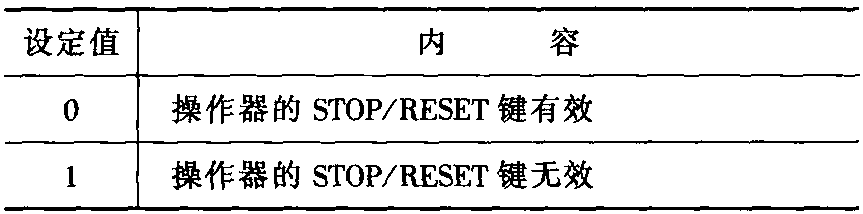
表2-4-15 本地模式频率指令选择
| 设定值 | 内 容 |
| 0 | 操作器的频率指令旋钮有效 |
| 1 | 操作器的数字设定有效 |
8.操作器频率设定方法选择 (n08)
当通过操作器的增加/减少键来数据设定频率指令时,选择输入键操作的有效/无效。见表2-4-16。
9.V/f模式设定 (n09~n15)
表2-4-16 操作器频率设定方法选择
| 设定值 | 内 容 |
| 0 | 输入键有效 (设定值通过输入键输入有效) |
| 1 | 输入键无效 (设定值即为频率指令) |
变频器的基本特性的V/f模式设定。每个频率的输出电压设定。
表2-4-17 V/f 模 式 设 定
| 常数No. | 名 称 | 设定范围 | 设定单位 | 出厂设定 |
| n09 | 最高频率 (FMAX) | 50.0~400 | 0.1Hz | 60.0 |
| n10 | 最大电压 (VMAX) | 1~255 | 1V | 200 |
| n11 | 最大电压频率 (FA) | 0.2~400 | 0.1Hz | 60.0 |
| n12 | 中间输出频率 (FB) | 0.1~399 | 0.1Hz | 1.5 |
| n13 | 中间输出频率电压(VC) | 1~255 | 1V | 12 |
| n14 | 最低输出频率 (FMIN) | 0.1~10.0 | 0.1Hz | 1.5 |
| n15 | 最低输出频率电压 (VMIN) | 1~50 | 1V | 12 |
注 n09,n11,n12的设定单位为不足100Hz: 0.1Hz为单位、100Hz以上: 1Hz为单位。
设定曲线见图2-4-15。
10.加减速时间设定 (n16~n19)
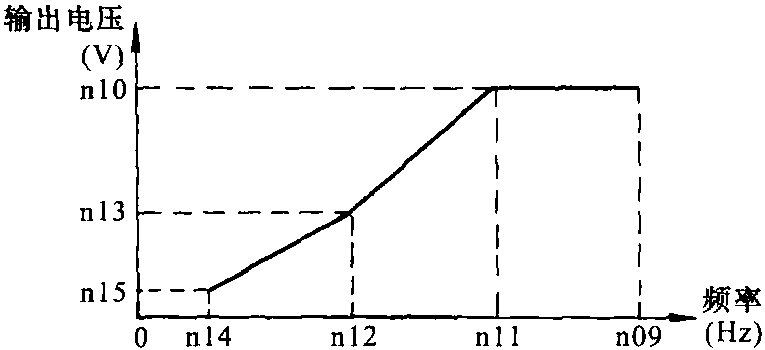
※设定应满足以下条件n14≤n12<n11≤n09。
※当设定为n14=n12时,n13的设定值无效。
图2-4-15 V/f模式设定曲线
加速时间: 从最高频率的0%到100%为止的时间。
减速时间: 从最高频率的100%到0%为止的时间。
※实际加减速时间如下:
加减速时间设定值×频率指令值÷最高频率参见表2-4-18。
11.S形特性时间选择 (n20)
选择加减速时的S形特性的有无及S形特性时间。见表2-4-19。
表2-4-18 加减速时间设定
| 常数No. | 名 称 | 设定范围 | 设定单位 | 出厂设定 |
| n16 | 加速时间1 | 0.0~999 | 0.1s | 10.0 |
| n17 | 减速时间1 | 10.0 | ||
| n18 | 加速时间2 | 10.0 | ||
| n19 | 减速时间2 | 10.0 |
表2-4-19 S形特性时间选择
| 设定值 | 内 容 |
| 0 | 无S形特性 (梯形加减速) |
| 1 | S形特性时间0.2s |
| 2 | S形特性时间0.5s |
| 3 | S形特性时间1.0s |
注 当设定了S形特性后,加减速时间各自延长S形特性时间。
12.频率指令1~8/微调频率指令 (n21~n29)
设定内部频率指令。见表2-4-20。
表2-4-20 频率指令1~8/微调频率指令
| 常数No. | 名 称 | 设定范围 | 设定单位 | 出厂设定 |
| n21 | 频率指令1 | 0.0~ 最高频率 | 0.1Hz1 | 6.0 |
| n22 | 频率指令2 | 0.0 | ||
| n23 | 频率指令3 | 0.0 | ||
| n24 | 频率指令4 | 0.0 | ||
| n25 | 频率指令5 | 0.0 | ||
| n26 | 频率指令6 | 0.0 | ||
| n27 | 频率指令7 | 0.0 | ||
| n28 | 频率指令8 | 0.0 | ||
| n29 | 微调频率指令 | 6.0 |
注 1.n21~n29的单位设定为:
不足100Hz: 0.1Hz为单位、100Hz以上: 1Hz为单位。
2.频率指令1在n03 (频率指令的选择) 设定为 “1”时有效 (远程模式时)。
3.频率指令1~8通过多段速指令 (多功能输入) 选择。见表2-4-21。
表2-4-21 多段速指令与关系频率指令
| 多段速指令1 | 多段速指令2 | 多段速指令3 | |
| 频率指令1 | × | × | × |
| 频率指令2 | ○ | × | × |
| 频率指令3 | × | ○ | × |
| 频率指令4 | ○ | ○ | × |
| 频率指令5 | × | × | ○ |
| 频率指令6 | ○ | × | ○ |
| 频率指令7 | × | ○ | ○ |
| 频率指令8 | ○ | ○ | ○ |
注 1.○为输入ON、×为输入OFF。
2.微调指令比多段速指令优先。
13.频率指令上限/下限 (n30·n31)
设定频率指令的上限值及下限值。
最高频率作为100%,按%单位各自设定。见表2-4-22。
14. 电动机额定电流 (n32)
作为电动机过载检出 (OL1) 的基准电流,设定电动机额定电流。
(1) 设定为 “0.0” 时,OL1检出无效。
(2) 出厂设定值是针对每个变频器的最大适用马达容量的一般额定电流时设定的。见表2-4-23。
表2-4-22 频率指令上限/下限
| 常数No. | 名 称 | 设定范围 | 设定单位 | 出厂设定 |
| n30 | 频率指令上限 | 0~110 | 1% | 100 |
| n31 | 频率指令下限 | 0~110 | 1% | 0 |
注 当频率指令下限 (n31) 的设定低于最低输出频率值(n14) 时,即使输入这个低于最低输出频率的频率指令,变频器也不会输出。
表2-4-23 电动机额定电流
| 常数 No. | 名 称 | 设定范围 | 设定 单位 | 出厂 设定 |
| n32 | 马达额定电流 | 0.0~ 变频器 额定输出电流 的120% | 0.1A | 视容量 不同 |
15.电动机保护特性选择 (n33)
配合所连接的电动机特性 (电子热敏特性) 进行设定 [电动机过载检出 (OL1)用参数]。见表2-4-24。
16.电动机保护动作时间 (n34)
电动机过载检出 (OL1) 的电子热敏保护时间常数以分为单位进行设定。见表2-4-25。
表2-4-24 电动机保护特性选择
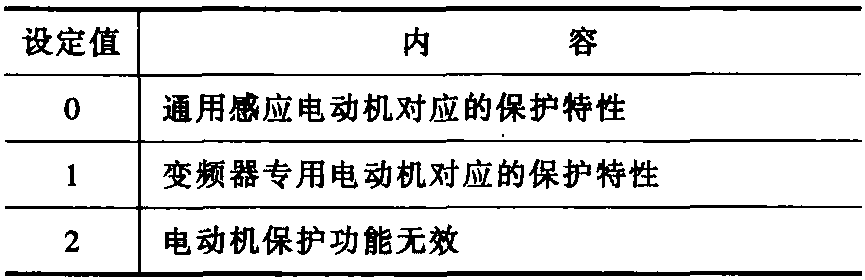
注 当1台变频器连接复数台电动机时应设定为 “2”(与n32= “0.0”功能相同)。同时,应对各电动机设置热敏继电器,准备好过载保护对策。
表2-4-25 电动机保护动作时间
| 常数 No. | 名 称 | 设定范围 | 设定 单位 | 出厂 设定 |
| n34 | 电动机保护动作时间 | 1~60 | 1min | 8 |
注 1.一般没有必要对出厂设定进行修改。
2.需要配合电动机特性进行设定时,应向电动机的制造商确认热时间常数,流出一定余地进行设定(比时间常数短)。
3.希望尽早检出电动机过载时,可以在保证应用上不出问题的情况下设定最短时间。
17.冷却风扇动作选择 (n35)
选择冷却风扇一直处于运转状态还是只在运行中运转。见表2-4-26。
18.加速中失速防止动作水平 (n56)
为了避免加速中出现失速现象,自动停止加速功能的动作水平的设定。
变频器的额定输出电流作为100%、以%为单位的设定。参见图2-4-16。
表2-4-26 冷却风扇动作选择
| 设定值 | 内 容 |
| 0 | 仅当输入运行指令使运转 (停止后,风扇继续运转1min) |
| 1 | 电源ON时,风扇一直运转 |
注 1.仅对带风扇的变频器有效。
2.在运行频率低的情况下,设定为 “0”,可以有效延长风扇寿命。
表2-4-27 加速中失速防止动作水平
| 常数 No. | 名 称 | 设定范围 | 设定 单位 | 出厂 设定 |
| n56 | 加速中失速防止动作 | 30~200 | 1% | 170 |
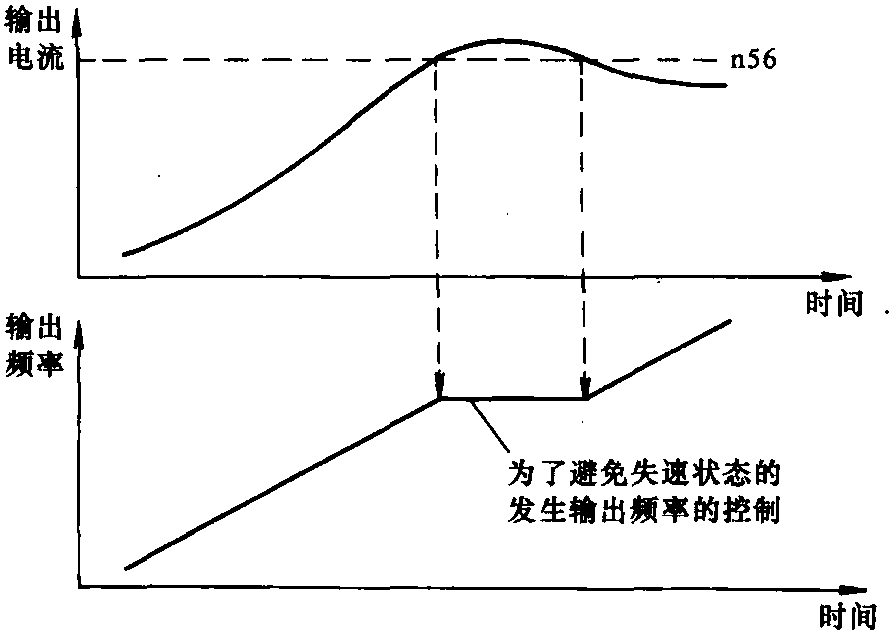
图2-4-16 加速中失速防止动作水平
19.运行中失速防止动作水平 (n57)
为了避免运行中出现失速现象,自动降低输出频率功能的动作水平的设定。
变频器的额定输出电流作为100%、以%为单位的设定。参见图2-4-17。
表2-4-28 运行中失速防止动作水平
| 常数 No. | 名 称 | 设定范围 | 设定 单位 | 出厂 设定 |
| n57 | 运行中失速防止动作 | 30~200 | 1% | 160 |
20.频率检出水平 (n58)
设定希望检出的频率。
当输出频率检出1、2时,需要设定多功能输出选择。
表2-4-29 频率检出水平
| 常数 No. | 名 称 | 设定范围 | 设定 单位 | 出厂 设定 |
| n58 | 频率检出水平 | 0.0~400 | 0.1Hz | 0.0 |
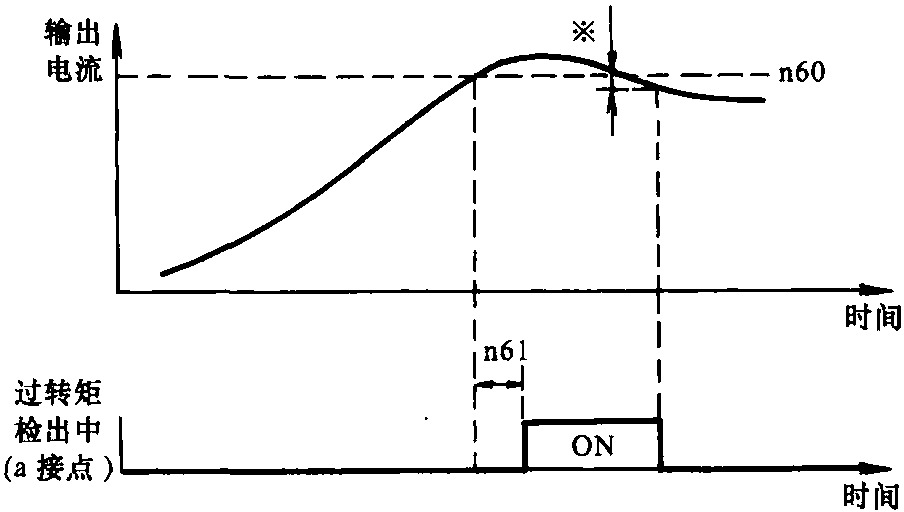
21.过转矩检出功能 (n59~n61)
通过n59 (过转矩检出功能选择),选择过转矩检出的有效/无效及检出后的处理。
在n60 (过转矩检出水平) 及n61(过转矩检出时间) 设定过转矩检出的条件。
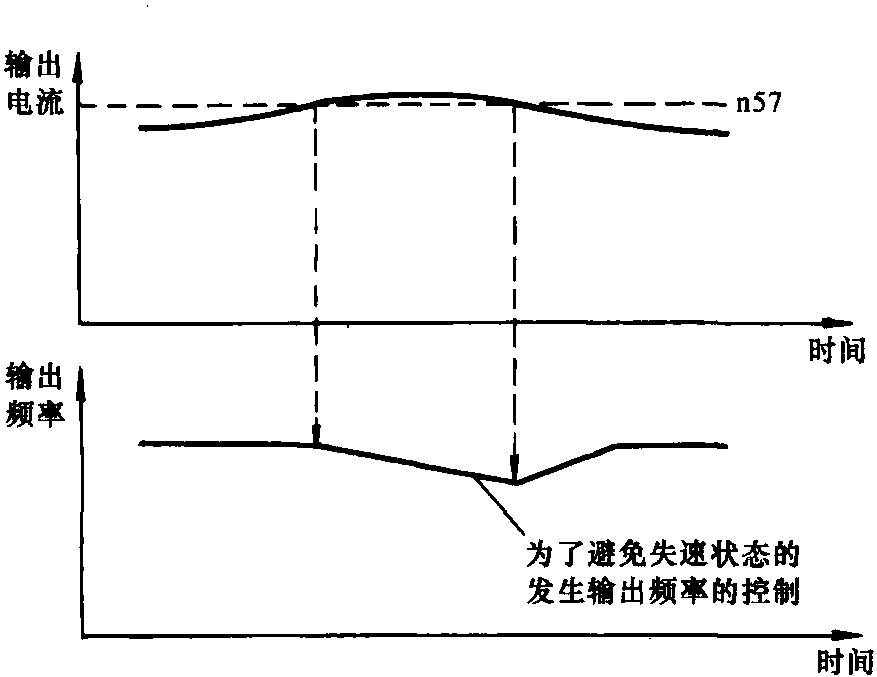
图2-4-17 运行中失速防止动作水平
表2-4-30 过转矩检出功能
| n59 设定值 | 内 容 | n59 设定值 | 内 容 |
| 0 | 无过转矩检出 | 3 | 运转中保持检出/检出后仍继续运转(警告) |
| 1 | 仅当速度一致时检出/检出后仍继续运转(警告) | 4 | 运转中保持检出/检出后中断输出(保护动作) |
| 2 | 仅当速度一致时检出/检出后中断输出(保护动作) |
注:过转矩检出的解除幅度为变频器额定电流的约5%。
图2-4-18 过转矩检出功能
表2-4-31 设定范围
| 常数 No. | 名 称 | 设定范围 | 设定 单位 | 出厂 设定 |
| n60 | 过转矩检出水平 | 30~200 | 1% | 160 |
| n61 | 过转矩检出时间 | 0.1~10.0 | 0.1s | 0.1 |
注 1.n60(过转矩检出水平) 中过转矩检出的检出水平应以变频器额定输出电流作为100%,以%为单位进行设定。
2. n61 (过转矩检出时间) 中过转矩检出的检出时间应以秒为单位进行设定。
22.模拟监控输出选择 (n44)
选择模拟监控输出的监控项目。见表2-4-32。
23.模拟监控输出增益 (n45)
表2-4-32 模拟监控输出选择
| 设定值 | 内 容 |
| 0 | 输出频率(最高频率时10V输出) |
| 1 | 输出电流 (变频器额定输出电流时10V输出) |
注 ( ) 内的值为n45=“1.00” 时的值。
表2-4-33 模拟监控输出增益
| 常数 No. | 名 称 | 设定范围 | 设定 单位 | 出厂 设定 |
| n45 | 模拟监控输出增益 | 0.00~2.00 | 0.01 | 1.00 |
24.载波频率的选择 (n46)
25.瞬停复位后的运转选择 (n47)
26.异常重试次数 (n48)
过电压 (OV)、过电流 (OC)、短路 (GF) 发生时,自动复位重新启动的次数设定。
表2-4-34 设定载波频率
| 设定值 | 内 容 |
| 1 | 2.5kHz |
| 2 | 5.0kHz |
| 3 | 7.5kHz |
| 4 | 10.0kHz |
| 7 | 2.5kHz (12倍) 输出频率的12倍 (在最低1.0kHz最高 2.5kHz之间) |
| 8 | 2.5kHz (24倍) 输出频率的24倍 (在最低1.0kHz最高 2.5kHz之间) |
| 9 | 2.5kHz(36倍) 输出频率的36倍 (在最低1.0kHz最高 2.5kHz之间) |
注 一般无需变更出厂设定。
表2-4-35 选择瞬间停电发生后的处理方法
| 设定值 | 内 容 |
| 0 | 不继续运转 |
| 1 | 0.5s以内的停电则继续运转 |
| 2 | 保持继续运转 |
表2-4-36 异常重启次数
| 常数 No. | 名 称 | 设定 范围 | 设定 单位 | 出厂 设定 |
| n48 | 异常重启次数 | 0~10 | 1 | 0 |
27.频率跨跳功能 (n49~n51)
见表2-4-37及图2-4-19。
28.直流制动功能 (n52~n54)
见表2-4-38及图2-4-20。
29.减速时失速防止选择 (n55)
见图2-4-21及表2-4-39。
为了减速时不发生过电压 (0V) 而选择减速时间的自动变更功能。
表2-4-37 设定频率跨跳功能
| 常数 No. | 名 称 | 设定 范围 | 设定 单位 | 出厂 设定 |
| n49 | 跨跳频率1 | 0.0~400 | 0.1Hz | 0.0 |
| n50 | 跨跳频率2 | 0.0~400 | 0.1Hz | 0.0 |
| n51 | 跨跳幅度 | 0.0~25.5 | 0.1Hz | 0.0 |
注 1.n09,n11,n12的设定单位为
不足100Hz: 0.1Hz为单位、100Hz以上: 1Hz为单位。
2.设定应满足以下条件: n49≥n50。
表2-4-38 感应电动机上施加直流电压使电动机制动的功能的设定
| 常数 No. | 名 称 | 设定 范围 | 设定 单位 | 出厂 设定 |
| n52 | 直流制动电流 | 0~100 | 1% | 50 |
| n53 | 停止时直流制动时间 | 0.0~25.5 | 0.1s | 0.5 |
| n54 | 启动时直流制动时间 | 0.0~25.5 | 0.1s | 0.0 |
表2-4-39 减速时失速防止选择
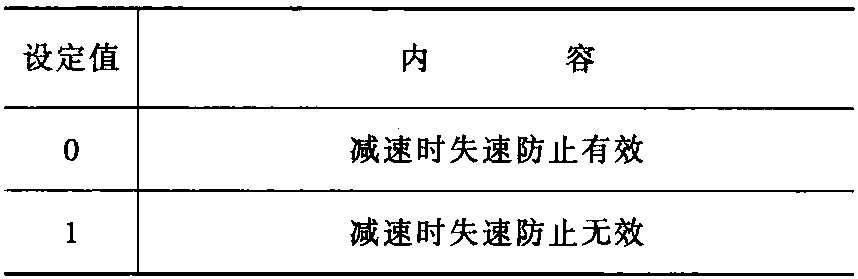
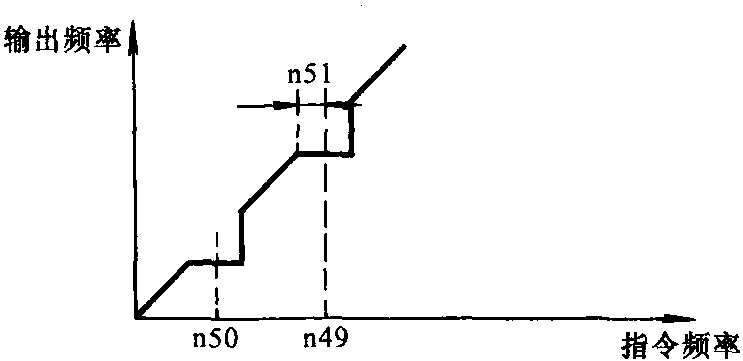
图2-4-19 频率跨跳功能
30.UP/DOWN频率的存储 (n62)
选择是否保存使用UP/DOWN功能调整后的频率指令,见表2-4-40。
表2-4-40 UP/DOWN频率的存储
| 设定值 | 内 容 |
| 0 | 不保存保持的频率 |
| 1 | 保存保持的频率 (状态必须保持5s以上) |
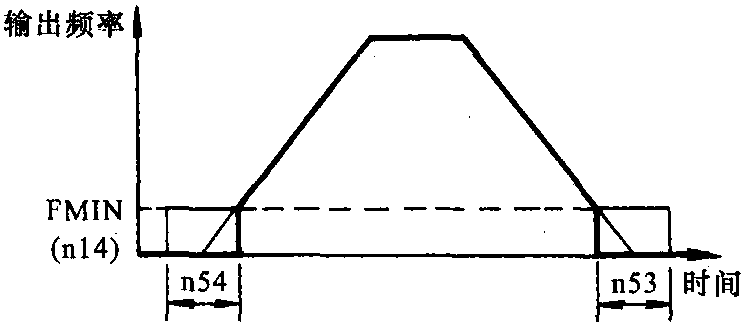
图2-4-20 直流制动功能曲线
直流制动电流: 变频器额定输出电流作为100%、以%为单位设定。
[减速时失速防止动作](n55=“0”时)
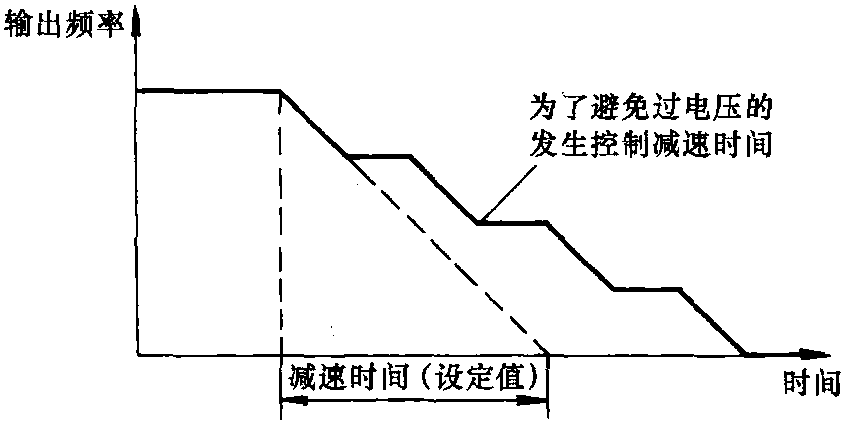
图2-4-21 减速时失速防止选择
【关于UP/DOWN功能】
·UP/DOWN功能是指通过UP/DOWN指令可以改变指令频率的功能。·使用UP/DOWN功能时,请将多功能输入选择4(n39)设为34(UP指令/DOWN指令设定)。多功能输入3(S4)及多功能输入4(S5)的端子功能设定如下:
多功能输入3(S4):UP指令
多功能输入4(S5):DOWN指令
·多功能输入端口中设定UP/DOWN指令后,可能过n62(UP/DOWN频率保存)的设定来决定是否保存频率。
·选择「保存」时,当状态持续5s以上时便会保存频率指令。即使关闭电源,当再次输入频率指令时,变频器仍会按照这个保存的频率再度运转。
·所保存的频率值在n62(UP/DOWN频率的保存)设为0(不保存)时,会被清除。另外,进行常数初始化(将n01设定为8或9)时,所保存的频率值也会被初始化。
※使用UP/DOWN功能时,在远程控制模式下,只能通过UP/DOWN指令或微调指令来输入频率。多速段指令在此状态下无效。
31.转矩补偿增益(n63)
设定转矩补偿增益(见表2-4-41)。一般无需改变出厂设定值。
表2-4-41 转 矩 补 偿 增 益
| 常数No. | 名 称 | 设定范围 | 设定单位 | 出厂设定 |
| n63 | 转矩补偿增益 | 0.0~2.5 | 0.1 | 1.0 |
32.滑差补偿功能(n64~n67)
在n64(电动机额定滑差)上,设定电动机额定滑差量。
在n65(电动机无负载电流)上,通过使用中的电动机的无负载电流对电动机额定电流的比率,用%来进行设定。
在n66(滑差补偿增益)上,设定滑差补偿功能的增益。
在n67(滑差补偿时间常数)上,设定滑差补偿功能的响应性。
表2-4-42 滑 差 补 偿 功 能
| 常数 No. | 名 称 | 设定范围 | 设定 单位 | 出厂 设定 | 常数 No. | 名 称 | 设定范围 | 设定 单位 | 出厂 设定 |
| n64 | 马达额定滑差 | 0.0~20.0 | 0.1Hz | 视容量 不同 | n66 | 滑差补偿增益 | 0.0~2.5 | 0.1 | 0.0 |
| n65 | 马达无负载电流 | 0~99 | 1% | 视容量 不同 | n67 | 滑差补偿时间常数 | 0.0~25.5 | 0.1s | 2.0 |
注 当n66设定为“0.0”时,滑差补偿功能无效。
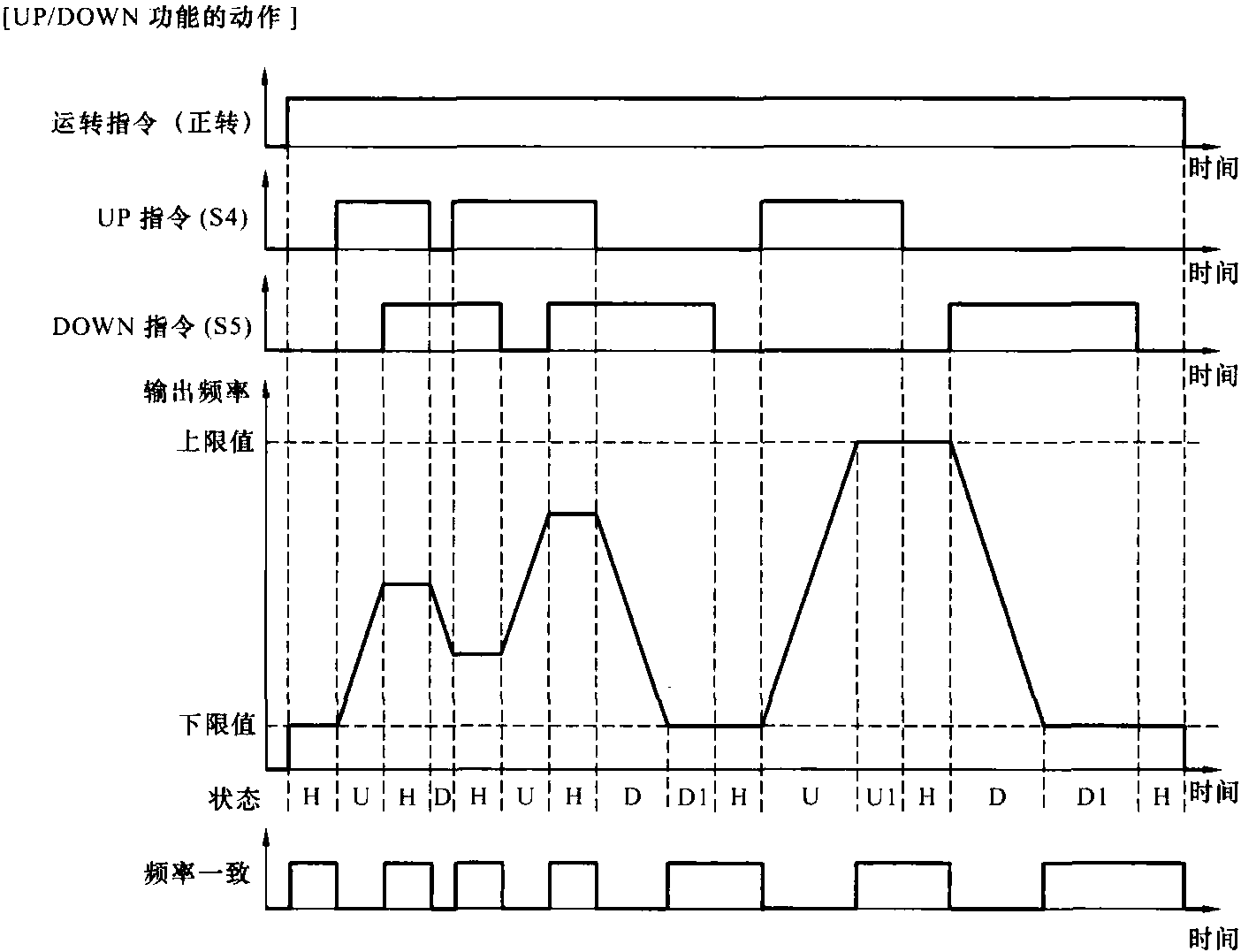
※状态的说明 U:UP(加速)状态
D:DOWN(减速)状态
H:保持状态
U1:UP状态,但受到上限值限制的状态
D1:DOWN状态,但受到下限值限制的状态
图2-4-25 UP/DOWN功能的动作