QB-R2绕线电动机调速控制器主要由控制单元和功率单元组成,两者之间通过接插件进行电气连接。控制单元由滤波板、驱动板、继电器输出控制板、升降或平移控制板和底板组成;功率单元由晶闸管、散热器、风扇、温度继电器及压敏电阻等几部分所组成,如图2-10-7所示。
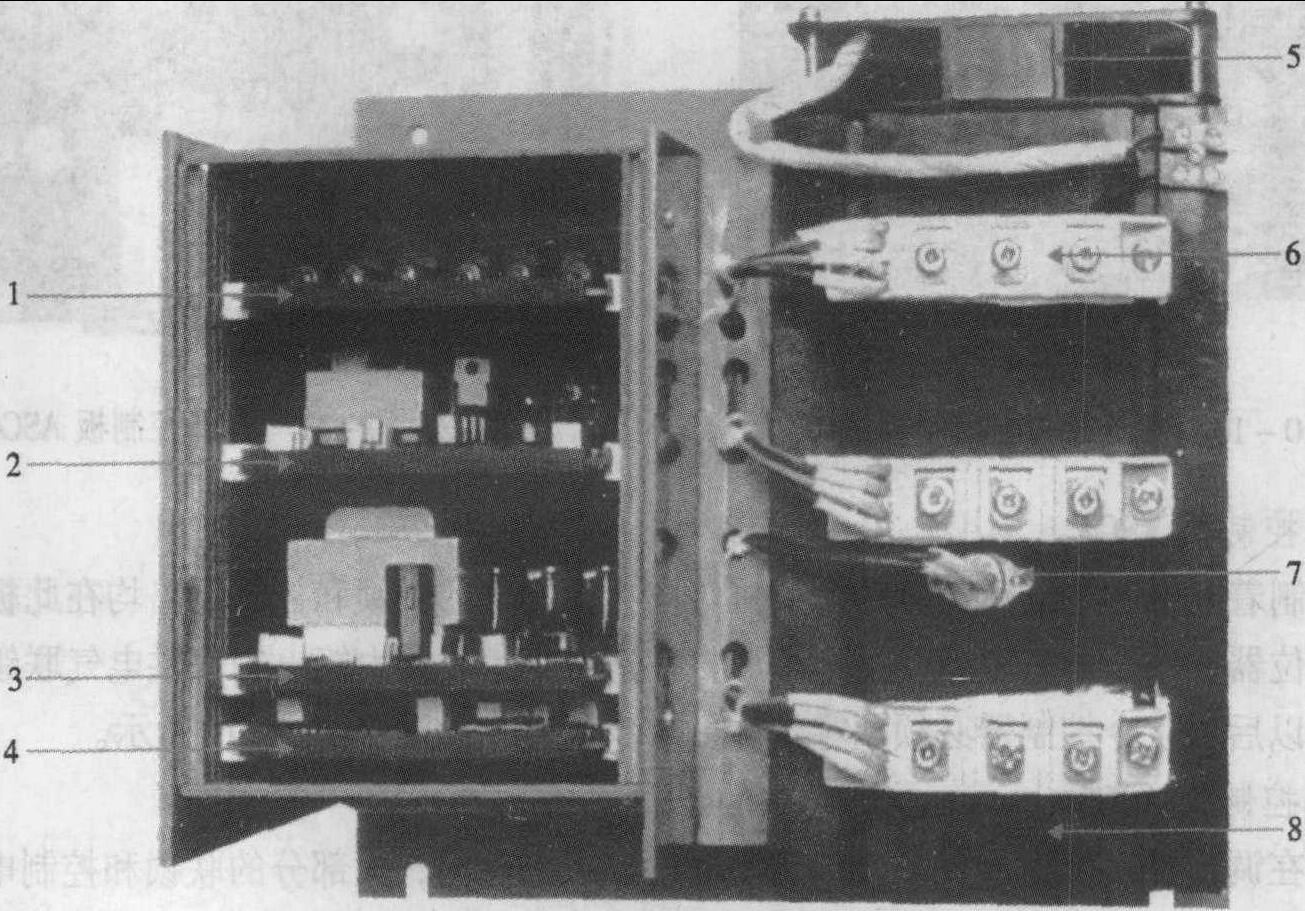
图2-10-7 QB-R2整体结构图
1—滤波板;2—驱动板;3—继电器输出控制板;4—升降或平移控制板
5—风扇;6—晶闸管;7—温度继电器;8—散热器
(二)控制板
1.滤波板ASC1
本板连同安装在晶闸管上的压敏电阻能有效的防止电网浪涌电压对电子电路及晶闸管造成的影响。滤波板提供了一个高等级的保护功能,如图2-10-8所示。
图2-10-8 滤波板ASC1
图2-10-9 驱动板ASC2
2.驱动板ASC2
本板主要控制晶闸管的导通角,晶闸管触发电路使用了相位锁定环控制技术,特别适用于电源波动大的环境,从而增强了控制系统的稳定性。该板上具有相序错误、缺相、三相不平衡、过欠压等保护功能。另外,它还提供10V的控制电压,如图2-10-9所示。
3.继电器输出控制板ASC3
本板包括五个继电器,用于控制外部接触器的通断,同时也具有逻辑保护功能。即如果安装在散热器上的热保护开关动作时,则本板给出逻辑保护功能,如图2-10-10所示。
图2-10-10 继电器输出控制板ASC3
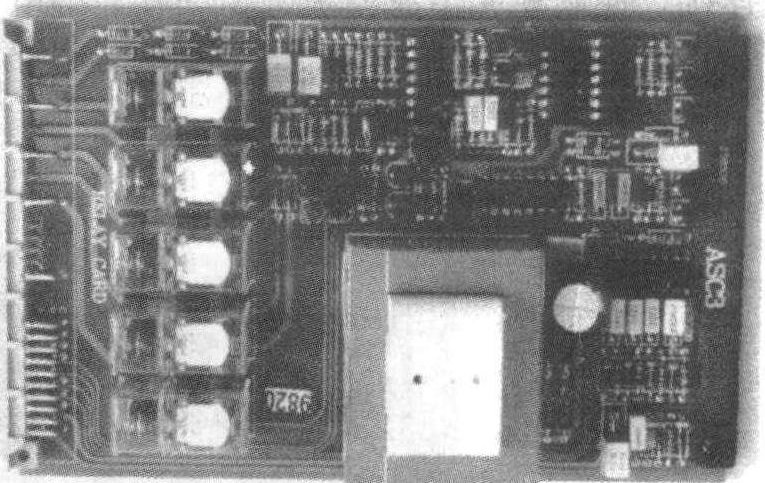
图2-10-11 升降控制板ASC4
4.升降控制板ASC4
本板控制着起升和下降运动时的电动机转向,大部分的联锁和控制电路均在此板上。板上有两个可调电位器:一个调整零速,另一个调整零速时最大反接力矩。它提供电气联锁以保证在出现电源故障以后,主令控制器必须回零位才能再次起动,如图2-10-11所示。
5.平移控制板ASC5
本板用在调速控制器中,控制左右运动时电动机的转向,大部分的联锁和控制电路均在该板上。板上只有一个调整零速的电位器,这与升降控制板不同,因为它不需要零速反接力矩。电气联锁与升降控制板一样,保证出现故障以后,主令控制器必须先回零位才能再次起动,如图2-10-12所示。
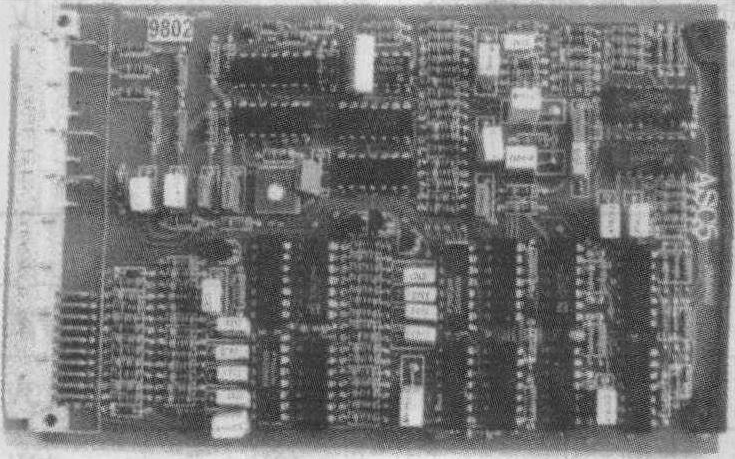
图2-10-12 平移控制板ASC5
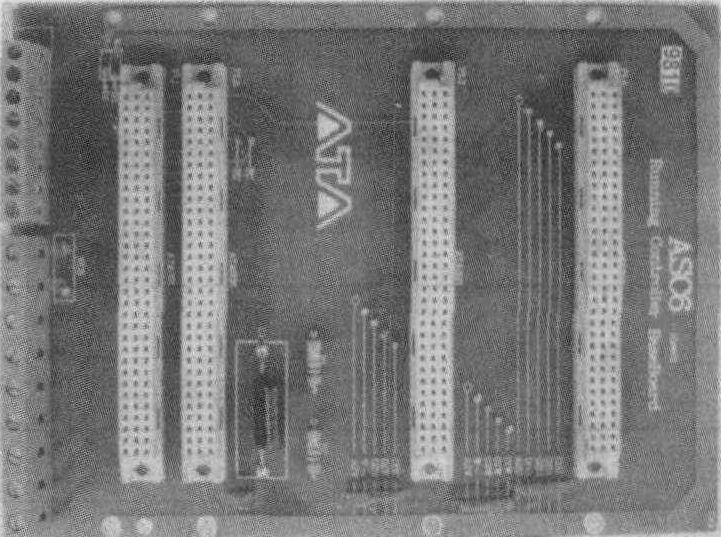
图2-10-13 底板ASC6
6.底板ASC6
本板用于各种控制板之间及控制板和主回路间电气连接,如图2-10-13所示。
(三)端子说明
QB-R2绕线电动机调速控制器的接线端子号参见图2-10-2和图2-10-3;端子说明如表2-10-2所示。
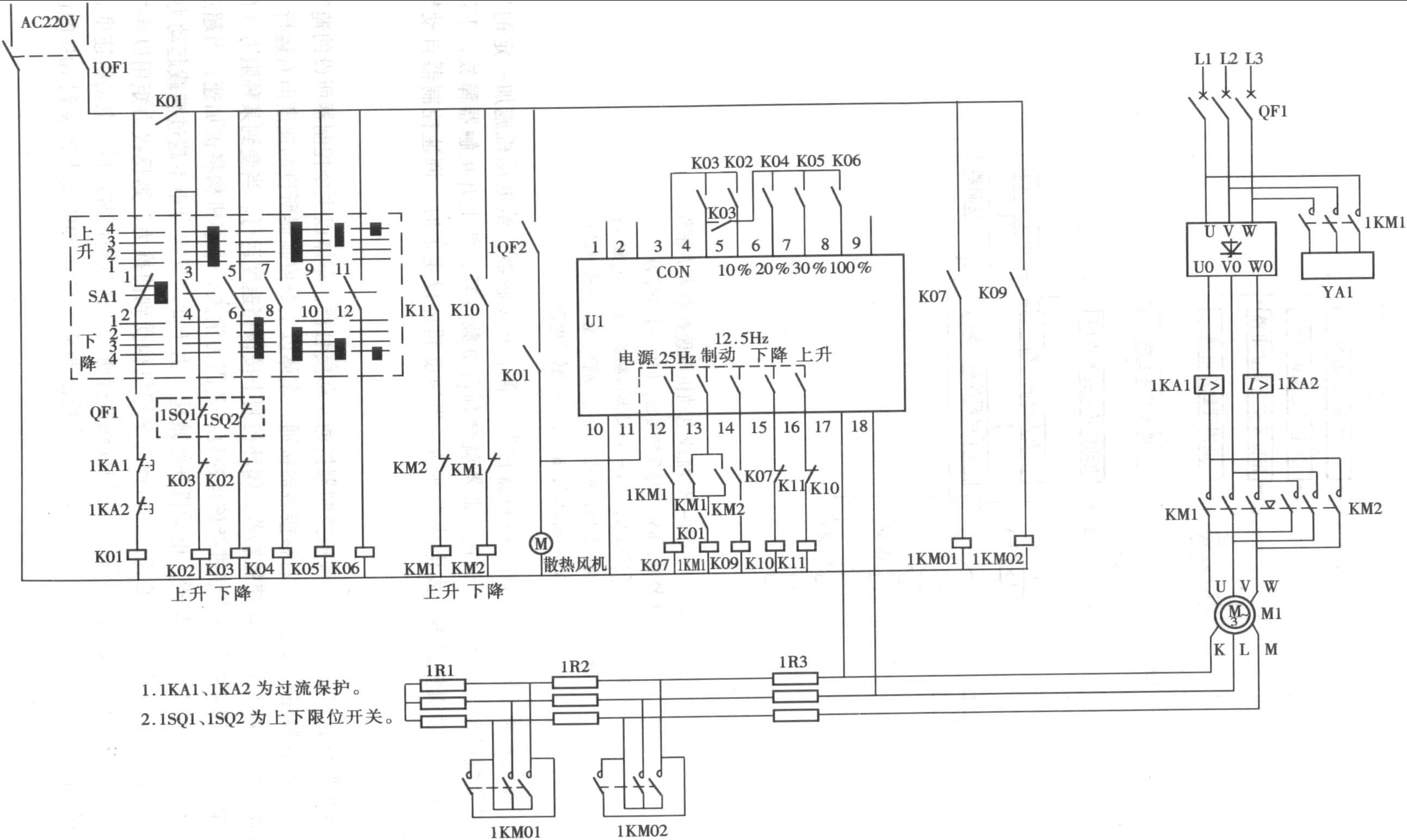
图2-10-2 升降机构原理图
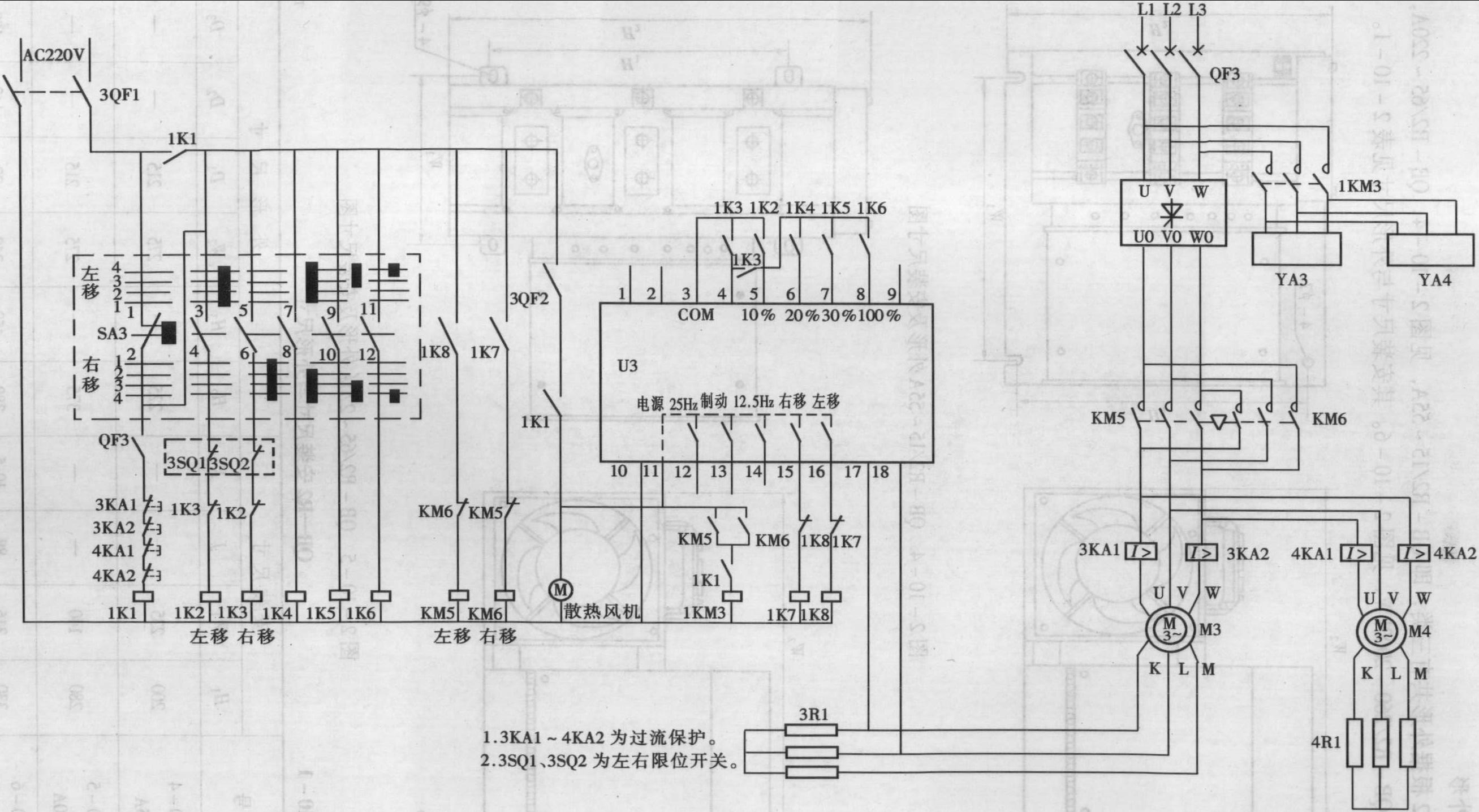
图2-10-3 平移机构原理图
表2-10-2 QB-R2绕线电动机调速控制器端子说明
| 端子号 | 1号 | 2号 | 3号 | 4号 | 5号 |
| 端子说明 | 备用 | 备用 | DC10V地 | 下降(后移、右移) 控制输入 | 10%速度给定 |
| 端子号 | 6号 | 7号 | 8号 | 9号 | 10号 |
| 端子说明 | 20%速度给定 | 30%速度给定 | 100%速度给定 | 备用 | 控制电压N |
| 端子号 | 11号 | 12号 | 13号 | 14号 | 15号 |
| 端子说明 | 控制电压L | 转子50% 速度输出 | 制动接触 器输出 | 转子75%速度输出 | 下降接触器输出 |
| 端子号 | 16号 | 17号和18号 | U、V、W | U0、V0、W0 | |
| 端子说明 | 上升接触 器输出 | 转子电压 反馈输入 | 主回路电源输入 | 主回路电源输出 |
(四)QB-R2系统基本配置
一套完整的行车控制系统包含QB-R2绕线电动机调速控制器、主回路断路器、主回路电源接触器、主回路换向接触器、转子加速接触器、制动接触器、输入/出中间继电器、主令控制器、转子电阻器以及相应的电气连接附件等,具体选型需根据行车大小来定。
选购、安装时参见图2-10-1~图2-10-3。
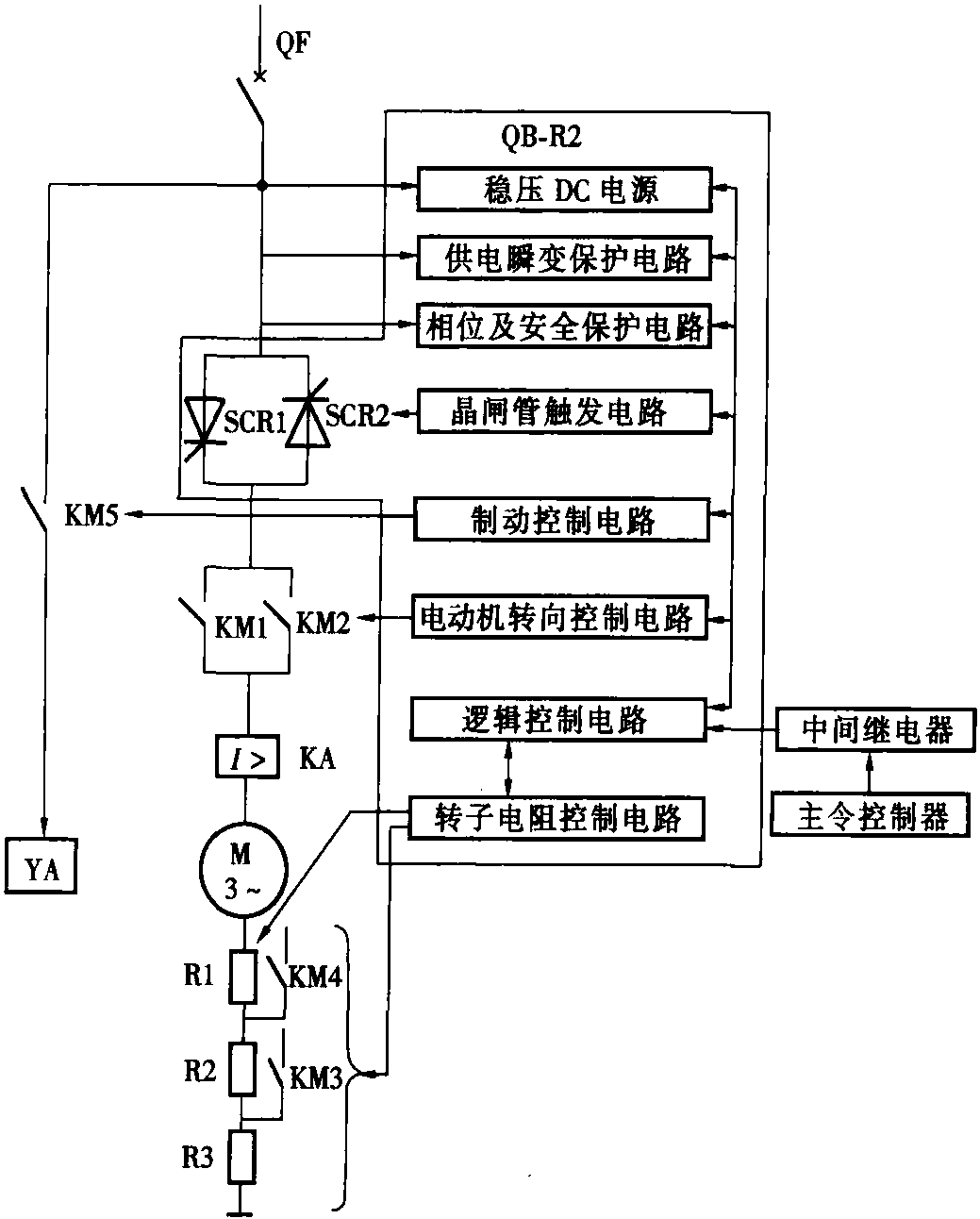
图2-10-1 QB-R2绕线电动机调速控制器方框图
QF—断路器;KM1—起升接触器;KM2—下降接触器;KM3、4—转子接触器; KM5—制动器接触器;KA—过载保护;QB—R2—调速控制器;
SCR1、2—晶闸管;M—绕线电动机;YA—制动器; R1、2、3—转子电阻
(五)QB-R2系统调试
1.系统上电之前的检查
(1)检查各控制回路的连线是否正确,有无松动。
(2)检查控制器接线端子上的连线是否符合设计要求。
(3)检查控制器上的每相晶闸管输入输出之间是否短路。
(4)检查控制器上动断温度继电器是否正常。
(5)检查电动机转子回路的电阻器各段阻值是否与设计要求相符。
2.系统上电调试
(1)断开主回路电源,接通控制回路电源,检查控制器的信号输入端子。主令在各挡位,控制器的4~8号接线端子对3号端子的电压应符合下表2-10-3的要求。
表2-10-3 控制器主令挡位正常电压表
| 挡 位 | 3号端子为直流电压10V地 | |||||
| 4号端子 | 5号端子 | 6号端子 | 7号端子 | 8号端子 | ||
| 上 升 左 移 前 移 | 1 | 10V | 0V | 10V | 10V | 10V |
| 2 | 10V | 0V | 0V | 10V | 10V | |
| 3 | 10V | 0V | 0V | 0V | 10V | |
| 4 | 10V | 0V | 0V | 0V | 0V | |
| 零 位 | 0 | 10V | 10V | 10V | 10V | 10V |
| 下 降 右 移 后 移 | 1 | 0V | 0V | 10V | 10V | 10V |
| 2 | 0V | 0V | 0V | 10V | 10V | |
| 3 | 0V | 0V | 0V | 0V | 10V | |
| 4 | 0V | 0V | 0V | 0V | 0V | |
(2)接通主回路电源,将升降机构和平移机构的主令控制器置于1挡,相应的接触器吸合,电动机运转。如调速控制器不起动,可能相序出错,应改变相序。
(3)调试升降机构及制动器:将主令控制器置于各挡位,观察在空钩、轻载、重载的情况下各挡位运行是否正常,在100%速度时加速接触器是否正常动作。在运行过程中,将起升机构逐渐加至满载,直到全速运行,检查在急停时调速制动器能否制动。再将主令控制器从任一下降挡回零,调速制动器应在电动机速度到零时抱闸,然后电动机断电。最后,按急停按钮,看能否对满载下降的负荷制动。
(4)调试平移机构及制动器:将主令控制器置于各挡位,观察各挡运行是否正常,加速、减速是否平稳。在100%速度时加速接触器是否正常动作。在运行过程中,将平移机构主令控制器从任一挡位回零时,调速控制器提供反接力矩,电动机速度到零时,制动器抱闸。