(一) 整体说明
1.硬件采用MAX485进行通信
软起动器上485接口管脚排列如图2-17-11所示。其中Vcc、GND为软起动用以供给外部用的5V电源的正、负端。
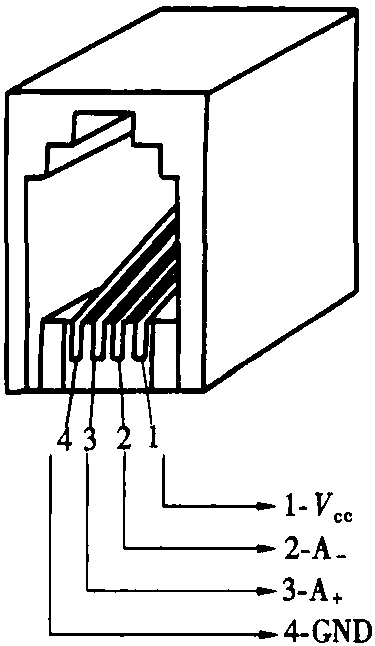
图2-17-11 485接口管脚排列图
2.通信格式
波特率设定范围2400,4800,9600。
字元格式如表2-17-9所示。
表2-17-9 通信格式
| 位 元 | 功 能 | 位 元 | 功 能 |
| 1 8 | 开始位 数据位 | 1 1 | 奇偶较验位 停止位 |
3.人机界面
人机界面见图2-17-12所示。
说明:
(1)选择手动刷新,将读取软起动器的状态。
(2)选择自动刷新,将自动以间隔1s时间读取软起动器的状态。
(3)双击相应的功能码号,即可查看、修改相应的功能码的值。
(二)命令类型及格式
(1)五种命令类型见表2-17-10所示。
表2-17-10 五种命令类型
| 命令类型 | 描 述 |
| 3 | 写功能码参数命令 |
| 4 | 读电动机参数命令 |
| 5 | 读功能码参数命令 |
| 6 | 运行命令 |
| 7 | 停车/复位命令 |
(2)数据包格式:上下位机收发的数据包均为18个字节。
(3)各命令数据包格式具体定义如表2-17-11~表2-17-16所示。
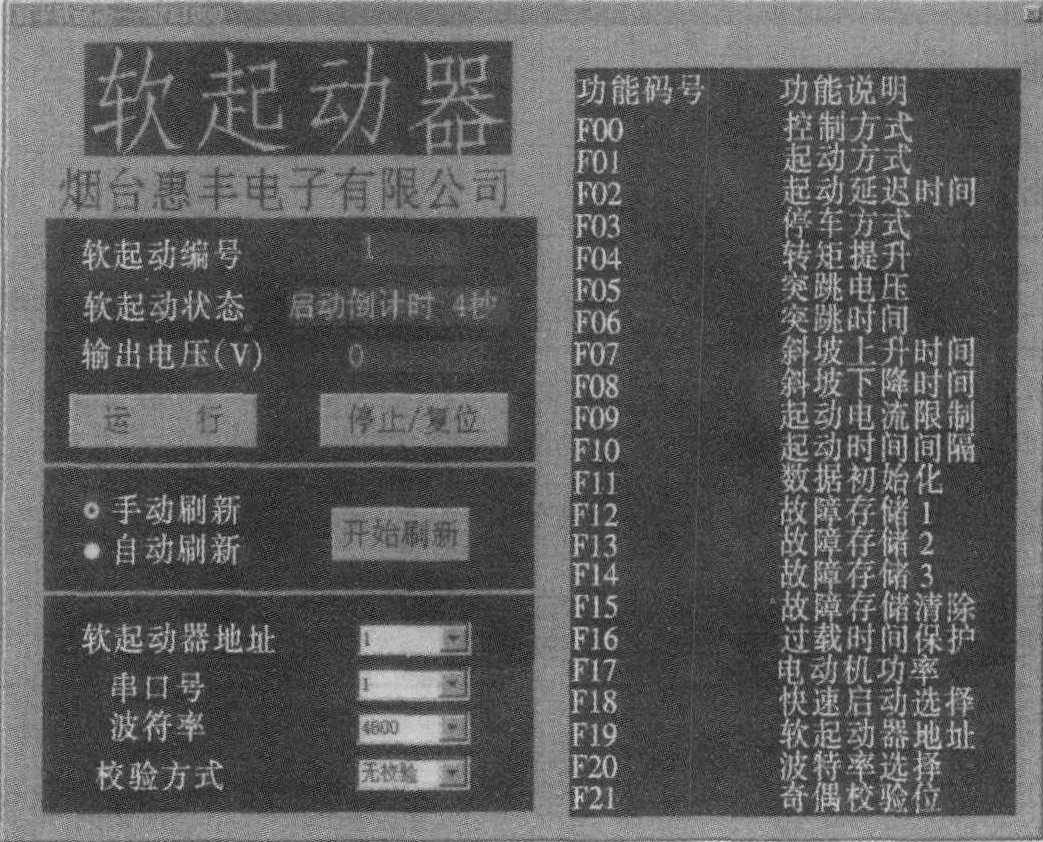
图2-17-12 人机界面
表2-17-11 上位机发送写功能码参数命令数据包时各字节功能定义
| 指针 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 |
| 功能 | 起始位 | 空 | 下位机地址 | 命令 | 空 | 空 | 功能码号 | 数值高∞位 | 数值低∞位 | 空 | 空 | 空 | 空 | 空 | 空 | 校验和 | 空 | |
| 数据 | E7 | E7 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||||||
表2-17-12 上位机发送读电动机参数命令数据包时各字节功能定义
| 指针 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 |
| 功能 | 起始位 | 空 | 下位机地址 | 命令 | 空 | 空 | 空 | 空 | 空 | 空 | 空 | 空 | 空 | 空 | 空 | 校验和 | 空 | |
| 数据 | E7 | E7 | 0 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||
表2-17-13 下位机收到上位机发送的读电动机参数命令后发送给上位机的数据包各字节功能定义
| 指针 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 |
| 功能 | 起始位 | 故障 代号 | 下位机 地址 | 命令 | 空 | 空 | 空 | 空 | 当前 状态 | 电压 | 倒计时 时间 | 空 | BB接 受正确 | 校验 和 | 空 | |||
| 数据 | E7 | E7 | * | * * | 0 | |||||||||||||
*第九个字节byte9定义如下:0表示停车(STOP);3表示启动完毕;4表示启动状态;5表示软停车(RT)。
** 电压=380×[8333-(byte (10) ×256+byte (11)] 6250。
表2-17-14 上位机发送读功能码参数命令数据包时各字节功能定义
| 指针 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 |
| 功能 | 起始位 | 空 | 下位机 地址 | 命令 | 空 | 空 | 功能 码号 | 空 | 空 | 空 | 空 | 空 | 空 | 空 | 空 | 校验和 | 空 | |
| 数据 | E7 | E7 | 0 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||
表2-17-15 下位机收到上位机发送的读功能码参数命令后发送给上位机的数据包各字节功能定义
| 指针 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 |
| 功能 | 起始位 | 故障 代号 | 下位机 地址 | 命令 | 空 | 参数值 高字节 | 参数值 低字节 | 空 | 空 | 空 | 空 | 空 | 空 | 空 | BB接 受正 确 | 校验 和 | 空 | |
| 数据 | E7 | E7 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||
表2-17-16 上位机发送6、7类型命令数据包时各字节功能定义
| 指针 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 |
| 功能 | 起始位 | 空 | 下位机 地址 | 命令 | 空 | 空 | 空 | 空 | 空 | 空 | 空 | 空 | 空 | 空 | 空 | 校验 和 | 空 | |
| 数据 | E7 | E7 | 0 | * | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||
* 第四个字节定义如下:byte4=6运行命令;byte4=7停车/复位命令。
对于以上3、6、7类型的命令1即写参数命令、运行命令、停车命令,软起动器按以下格式发送给上位机,若软起动器接收正确,则上发数据BB;若接收的不正确则上发数据AA;无权修改或修改超出范围,则发送CC。具体格式如表2-17-17所示。
表2-17-17 对于以上3、6、7类型命令软起动器发送给上位机的具体格式
| 指针 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 |
| 功能 | 起始位 | 故障 代号 | 下位 机地 址 | 命令 | 空 | 空 | 空 | 空 | 空 | 空 | 空 | 空 | 空 | 空 | 标志 | 校验 和 | 空 | |
| 数据 | E7 | E7 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | AA/ BB/ CC | 0 | ||||
(三) 有关附加说明
(1)所有上位机byte16(校验和)的值为本数据包 (byte2+byte3+byte4+byte5+byte6+byte7+byte8+byte9+byte10+byte11+byte12+byte13+byte14+byte15)和的低字节。
所有下位机byte16(校验和)的值为本数据包(byte2+byte3+byte4+byte5+byte6+byte7+byte8+byte9+byte10+byte11+byte12+byte13+byte14+byte15)和的低字节。
(2)下位机上传给上位机的byte2字节(故障代码)定义如下:
0无故障;
1/*OH*/ 过热保护;
2/*OC*/过流保护;
3/*PF*/ 缺相保护;
4/*OL*/ 过载保护。
(3)软起动器的地址有效范围为1~16。地址255 (FFH)代表的是广播地址,对所有的软起动都有效。软起动收到广播命令后不上传数据。
(4)以上表格中为“空”值的,其值=0。