7200GS设定于PID省能源控制模式(Sn-13=10: PID) 时,除具有自动节能机能外,亦具有PID机能,可利用不同检出器作回授信号,经PID控制后,作速度控制、压力控制、流量控制或温度控制等不同之应用。
(一) PID控制模式之相关参数
表2-19-93为作PID控制时所使用到的参数。
表2-19-93 PID控制参数表
| 机能 | 参数 No. | 名称及说明 | LCD画面显示 (中文版) | 最小设 定单位 | 设定范围 | 出厂 设定 | 存取权限 | |||
| GP | SL | PID | PG | |||||||
| PID控制 之目标值 设定① | An-01 | 目标值1设定 (频率指令1) | An-01=060.00Hz 频率指令1 | 0.01Hz | 0.00~ 400.00Hz | 60.00Hz | ○ | ○ | ○ | ○ |
| An-02 | 目标值2设定 (频率指令2) | An-02=000.00Hz 频率指令2 | 0.01Hz | 0.00~ 400.00Hz | 0.00Hz | ○ | ○ | ○ | ○ | |
| An-03 | 目标值3设定 (频率指令3) | An-03=000.00Hz 频率指令3 | 0.01Hz | 0.00~ 400.00Hz | 0.00Hz | ○ | ○ | ○ | ○ | |
| An-04 | 目标值4设定 (频率指令4) | An-04=000.00Hz 频率指令4 | 0.01Hz | 0.00~ 400.00Hz | 0.00Hz | ○ | ○ | ○ | ○ | |
| An-09 | 目标值5设定 (寸动频率指令) | An-09=006.00Hz 寸动指令1 | 0.01Hz | 0.00~ 400.00Hz | 6.00Hz | ○ | ○ | ○ | ○ | |
续表
| 机能 | 参数 No. | 名称及说明 | LCD画面显示 (中文版) | 最小设 定单位 | 设定范围 | 出厂 设定 | 存取权限 | |||
| GP | SL | PID | PG | |||||||
| PID控 制之控 制参数 设定 | Bn- 13 | PID检测值增益 | Bn-13=01.00 PID检出增益 | 0.01 | 0.01~10.00 | 1.00 | × | × | ○ | × |
| Bn-14 | PID比例增益 (P) | Bn-14=01.0 PID比例增益 | 0.1 | 0.0~10.0 | 1 .0 | × | × | ○ | × | |
| Bn- 15 | PID积分时间 (I) | Bn-15=010.0s PID积分时间 | 0.1s | 0.0~100.0s | 10.0s | × | × | ○ | × | |
| Bn-16 | PID微分时间 (D) | Bn-16=0.00s PID微分时间 | 0.01s | 0.00~1.00s | 0.00s | × | × | ○ | × | |
| Bn-17 | PID偏压(offset) 调整 | Bn-17=000% PID偏差量 | 1% | 0~109% | 0% | × | × | ○ | × | |
| Cn-43 | PID积分上限值 | Cn-43=100% PID积分上限 | 1% | 0~109% | 100% | × | × | 1 | * | |
| Cn-44 | PID一次延迟时间 常数 | Cn-44=0.0s PID延迟量 | 0.1s | 0.0~2.5s | 0.0s | × | × | 1 | * | |
| 积分值 Reset | Sn-15 ~ Sn- 18 | 以外部触点信号作 积分值之Reset | — | — | — | — | ○ | ○ | ○ | ○ |
| PID控制 之Disable | Sn-15~ Sn-18 | 以外部触点信号作 PID控制之disable | — | — | — | — | ○ | ○ | ○ | ○ |
| PID控 制选择 | Sn-19 | 设定Sn-19=09时, 可作PID控制用 | — | — | — | — | ○ | ○ | ○ | ○ |
| 控制方 式选择 | Sn-13 | 控制方式选择 | Sn-13=10 PID控制模式 | — | — | — | ○ | ○ | ○ | ○ |
① An-□□之设定单位,可由参数Cn-20决定。
* Cn-43~44在PG控制方式下的机能请参阅“PG控制方式”。
(二)PID控制之信号输入
将多机能类比输入机能选择参数Sn-19设定为09时,则进入PID控制之操作模式,此时端子(16)可作为PID控制之目标值设定用输入端子(当然目标值,亦可由An-01~04设定),而检出值之回授信号,可由端子(13)(0~10V)或(14)(4~20mA)输入,当(13)及(14)同时输入信号时,则(13)及(14)信号两者自动相加,如图2-19-59所示。
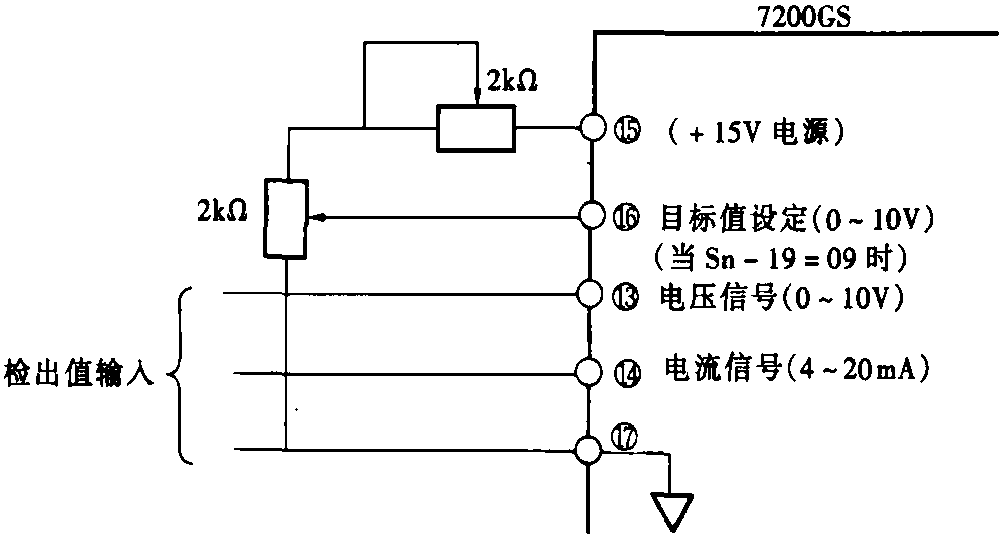
图2-19-59 PID控制信号输入图
目标值之设定可利用端子(16)或频率指令设定参数An-01~04及An-09。
(1)利用端子(16)时: Sn-04=×××0。
(2)利用频率指令设定参数An时: 可利用An-01~An-04及An-09来设定目标值,而利用多段速指令1,2及寸动指令(由参数Sn-15~Sn-18来设定)之组合可选择所要的目标值。如表2-19-94所示。
表2-19-94 目标值之选择
| 寸动指令 | 多段速2 | 多段速1 | 目 标 值 |
| OFF | OFF | OFF | An-01* |
| OFF | OFF | ON | An-02 |
| OFF | ON | OFF | An-03 |
| OFF | ON | ON | An-04 |
| ON | — | — | An-09 |
* 当Sn-04=×××0时,目标值由端子(16)设定。
Sn-04=×××1时,目标值由An-01设定。
(三) PID控制之调整方法
1.PID控制方块图及PID控制步阶 (step)偏差响应
例如偏差=目标值-检出值×bn-13;
P的输出=偏差×bn-14;
I的输出=经过积分时间(bn-15)后,I的输出值与偏差值大小相同,随积分时间,I值会愈来愈大,其上限值由Cn-43限制;
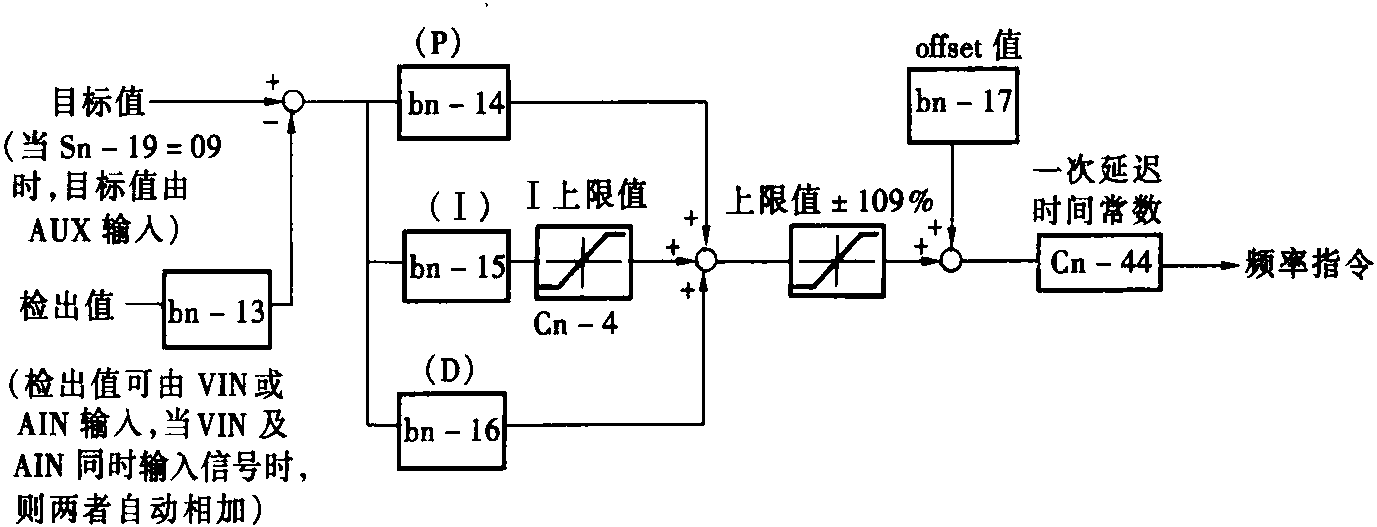
图2-19-60 PID控制方块图
PID的最后输出值是上述3个量相加。
PID控制方块图见图2-19-60。PID控制step偏差的响应见图2-19-61。
2.调整PID控制参数
适当调整P(比例增益bn-14)、I(积分时间bn-15)、D(微分时间bn-16)参数,可以使检出回授信号与目标设定值相合。
利用不同检出器的回授信号,经PID控制后,可作速度控制、压力控制、流量控制及温度控制等不同应用。
(1)PID控制之基本动作原理。
当目标设定值与检出值相差一固定值时,经过P控制、I控制及D控制回路,其输出分别如图2-19-62所示。
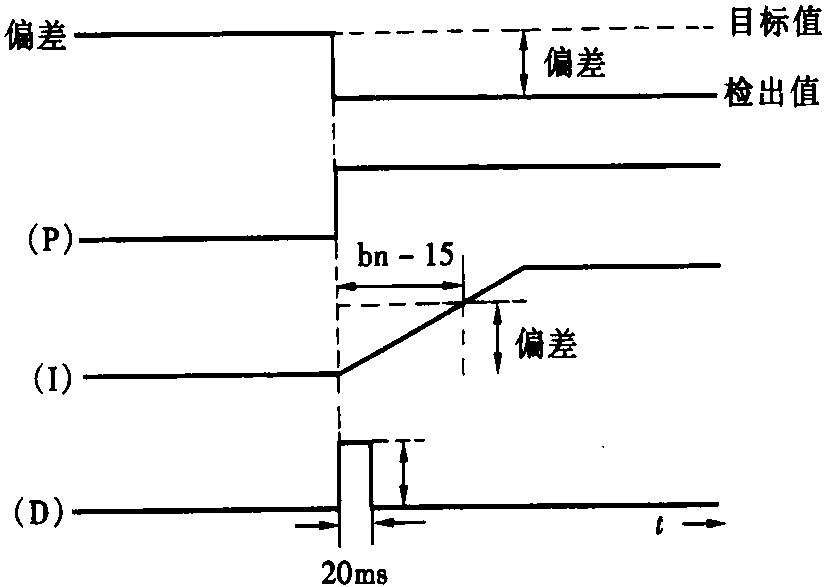
图2-19-61 PID控制step偏差的响应
P控制:输出值比例于偏差值大小。
I控制:输出值为偏差值的积分,经积分时间(bn-15)后,I控制的输出值与偏差值大小相同。当偏差值突然变化时,I控制的输出并无法跟随突然变化。
D控制:输出值为偏差值之微分。当偏差值突然变化时,D控制的输出会跟随着突然变化,以得到快速响应。
所以适当调整P、I、D之参数,可以得到所希望的响应特性。
(2) PID参数之调整。
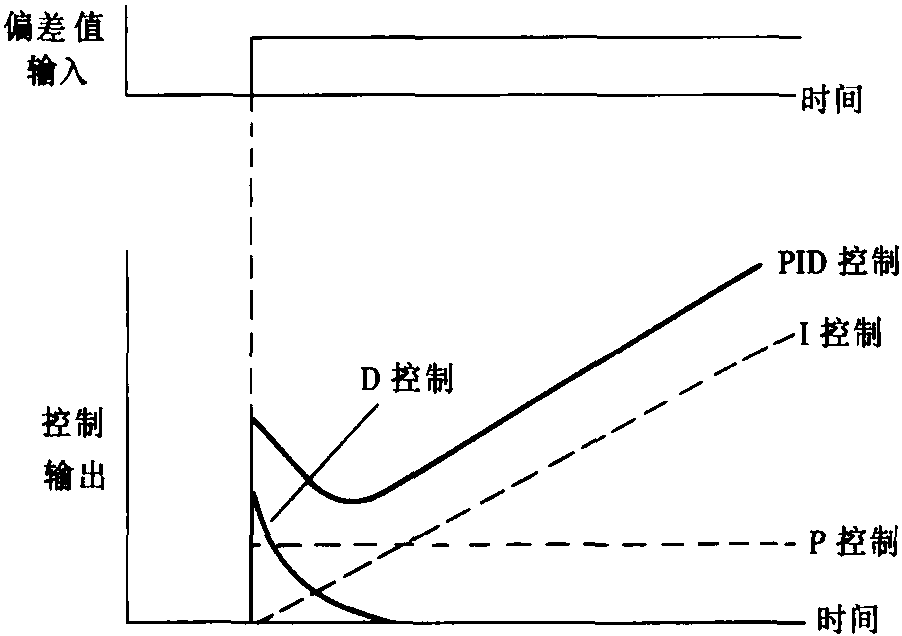
图2-19-62 PID控制原理
PID控制参数调整方块图,依以下步骤分别调整P、I、D参数,同时观察其输出响应。
①使PID机能有效(Sn-19=09,且若Sn-15~18任何一个参数设为66时,则端子5~8不可“闭”)。
②尽量增大比例增益P (bn-14),但不可产生振荡。
③尽量降低积分时间I (bn-15),但不可产生振荡。
④尽量增大微分时间D (bn-16),但不可产生振荡。
依上述步骤,分别调整P、I、D参数后,可依下述之输出响应,再作微调,以满足系统所要的控制特性。
(1)减少超越量 (Overshooting)。
若输出响应有超越量产生时,可降低微分时间D (bn-16)及增大积分时间I (bn-15)。见图2-19-63所示。
(2)快速达到稳态的控制。
若系统允许有超越量产生,以达到快速稳定之控制时,可缩短积分时间I (bn-15) 及增大微分时间D (bn-16)。见图2-19-64所示。
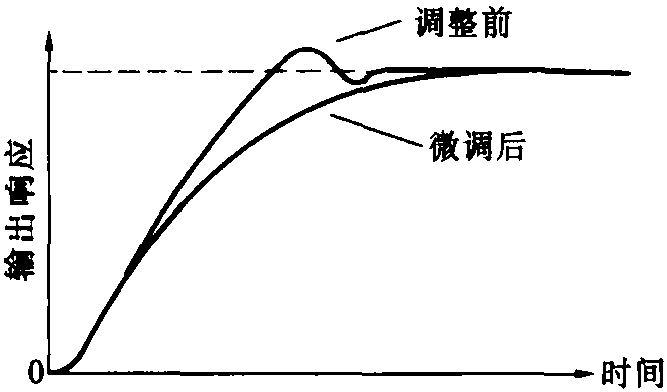
图2-19-63 PID减少超越量的措施
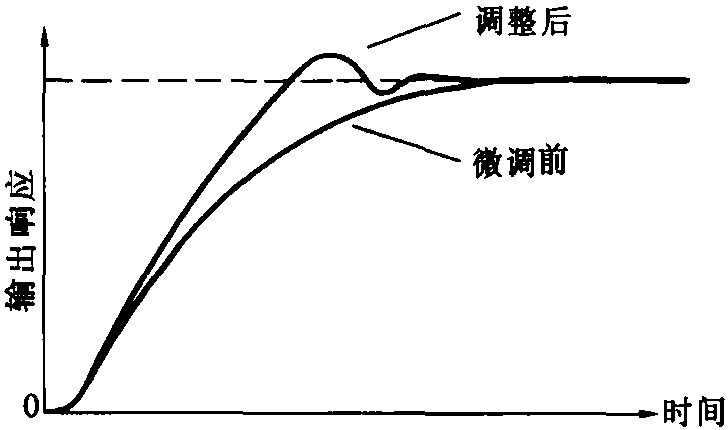
图2-19-64 快速稳定的控制
(3)减少长周期之振荡。
若输出响应发生比积分时间I (bn-15)长之振荡周期时,可增大积分时间I,以降低振荡,如图2-19-65所示。
(4)减少短周期之振荡。
若输出响应发生振荡周期近似微分时间D (bn-16)之短周期振荡时,可降低微分时间D,以减少振荡。但若将微分时间D调为0.00s时,仍然无法减少振荡情形时,可降低比例增益P(bn-14)或增大PID控制之一次延迟时间(Cn-44)。见图2-19-66所示。
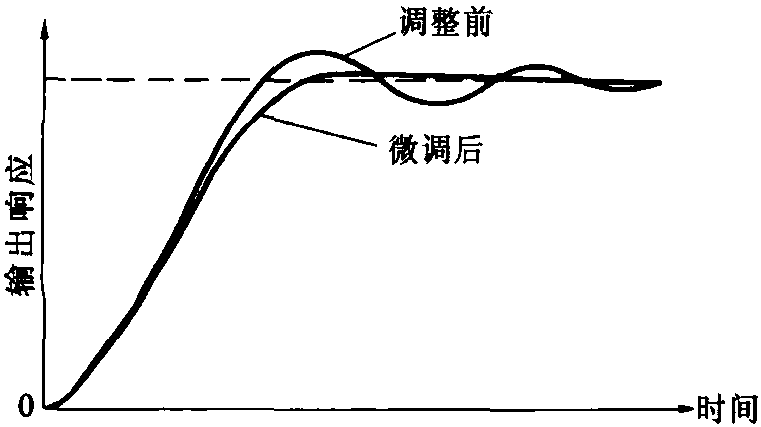
图2-19-65 减少长周期振荡
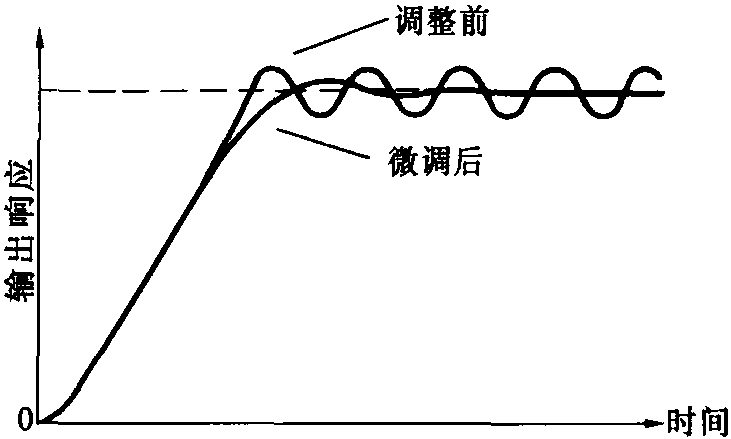
图2-19-66 减少短周期振荡