(一) 显示组 (DIS_00)
1.DIS_00 (显示电动机的控制情况)
LCD屏幕上显示电动机速度,电动机控制模式,转矩和变频器输出电流。当变频器工作时这个代码会一直显示。参见表2-7-25。
2.DIS_01~03 (用户选择显示1、2和3)
用户选择的显示1、2和3可以分别显示出下面表格中的任一数据之一。
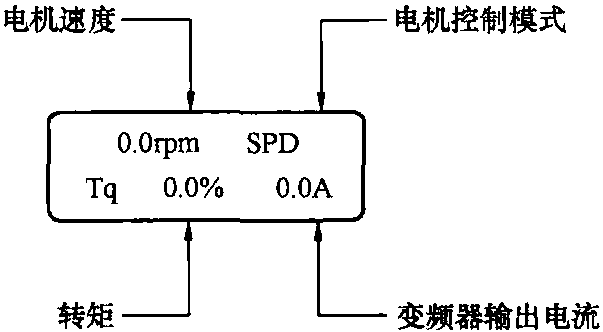
图2-7-44 显示电动机的控制
出厂值DIS_01设置为 ‘Pre Ramp Ref’、DIS_02设置为 ‘DC Bus Volt’、DIS_03设置为‘Terminal In’。参见表2-7-26。
表2-7-25 DIS_00 显 示 组
| 代码序号 | 代码名称 | 单 位 | 功 能 描 述 |
| DIS_00 | 电动机速度 | rpm | 以rpm为单位显示电机的真实速度 |
| 电动机控制代码 | SPD: 速度控制模式 | ||
| TRQ:转矩控制模式 | |||
| BX: BX运行 | |||
| 转矩 | % | 电动机额定转矩的百分数 | |
| 变频器输出电流 | A | 在RMS下显示 |
表2-7-26 DIS_01~03显示
| 代码序号 | LCD显示 | 代码名称 | 单位 | 描 述 |
| DIS_01 ~ DIS_03 | Ai1 Value~Ai6 Value | 多功能模拟输入值 | % | 显示百分数% (10V/100%,20mA/ 100%) |
| Pre Ramp Ref | 预设加速/减速速度设定 | rpm | 加速/减速开始前的速度设定 | |
| Post Ramp Ref | 目标加速/减速速度设定 | rpm | 加速/减速开始后的目标速度设定 | |
| ASR Inp Ref | 速度控制输入设定 | rpm | ASR的最终速度设定 (包括牵引和 Droop) | |
| Motor Speed | 电动机真实速度 | rpm | 电动机真实速度 | |
| Speed Dev | 速度远离数值 | rpm | 指令和速度之间的错误数值 | |
| ASR Out | 速度控制器输出 | % | 额定转矩的百分率上ASR的输出值 | |
| Torque Bias | 转矩偏差 | % | 额定转矩有关的转矩偏差值 | |
| Torque Limit | 转矩限制 | % | 额定转矩相关的转矩限制值 | |
| Torque Ref | 转矩给定 | % | 额定转矩相关的转矩给定值 | |
| Iqe Ref | 给定转矩电流 | % | 额定转矩电流相关的给定值 | |
| Iqe | 转矩电流 | % | 额定转矩电流相关的真实值 | |
| Flux Ref | 给定磁通量 | % | 额定磁通量相关的给定值 | |
| Ide Ref | 给定磁通量电流 | % | 额定磁通量电流相关的给定值 | |
| Ide | 磁通量电流 | % | 额定磁通量电流相关的真实值 | |
| ACR_Q Out | Q轴ACR输出 | V | Q轴ACR输出 | |
| ACR_D Out | D轴ACR输出 | V | D轴ACR输出 | |
| Vde Ref | D轴给定电压值 | V | D轴给定电压值 | |
| Vqe Ref | Q轴给定电压值 | V | Q轴给定电压值 | |
| Out Amps RMS | 输出电流 | A | RMS中变频器输出电流 | |
| Out volt RMS | 输出电压 | V | RMS中变频器输出电压 | |
| Out Power | 输出功率 | kW | 电动机输出功率 | |
| Dc Bus Volt | 直流连接电压 | V | 变频器直流连接电压 | |
| Proc PID Ref | 过程PID给定 | % | 过程PID给定值 | |
| Proc PID F/B | 过程PID反馈 | % | 过程PID反馈值 | |
| Proc PID Out | 过程PID输出 | % | 过程PID输出值 | |
| Motor Temp | 电动机温度 | deg | 显示电动机温度。如果电动机没安装 传感器,显示25度 | |
| INV Temp | 变频器温度 | deg | 变频器中热接受器的温度 | |
| INV i2t | 变频器I2t | % | 变频器热容。150%的电流,1分钟变 成100% | |
| MP Output | MOP输出 | % | 端子输入Displays setting value when digital volume operation by terminal input is on | |
| Ctrl Mode | 控制模式 | 当前使用的控制模式 | ||
| S/W Version | 软件版本 | 变频器软件版本号 | ||
| Run Time | 运行时间 | 上电后变频器运行时间 |
续表
| 代码序号 | LCD显示 | 代码名称 | 单位 | 描 述 | ||||||||||
| DIS_01 DIS_03 | Terminal In | 输入端子状况 | 输入端状况ON/OFF (0: OFF,1: ON) | |||||||||||
| Bit | MSB LSB | |||||||||||||
| SIO | FX | RX | BX | P1 | P2 | P3 | P4 | P5 | P6 | P7 | ||||
| Terminal Out | 输入端子状况 | 集电极开路输出的状况ON/OFF 继电器输出和故障报警继电器输出 (0: OFF,1:ON) | ||||||||||||
| Bit | MSB LSB | |||||||||||||
| SIO | AX1 | AX1 | OC1 | NC | NC | NC | ||||||||
| Run Status | 运行状况 | 当前运行状况 | ||||||||||||
3.DIS_04 (过程PID控制)
在同一个LCD屏幕上显示过程PID控制器的输出值、指令值和反馈值。
4.DIS_05 (故障显示)
显示当前故障,先前故障记录和故障清除功能。所有都可以在DIS_05中使用 [SHIFT/ESC] 设置见表2-7-27。
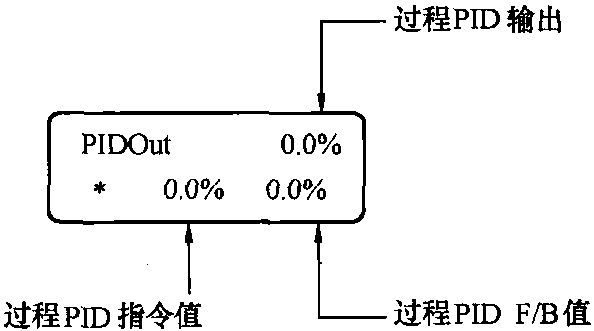
图2-7-45 DIS_04显示
当故障发生时,按 [RESET]键以前,需要在[PROG]使用 [▲(Up)]/[▼ (Down)]键检查速度指令和反馈值、输出频率、电流、电压、当前转矩指令和真实值,直流连接电压,端子输入输出状态,运行状态和运行时间。按[ENT]键使当前显示返回到初始屏幕显示,按 [RESET] 使当前的故障保存为先前故障1。见表2-7-28。
表2-7-27 DIS_05 显 示
| 代码序号 | LCD显示 | 功 能 | 描 述 |
| DIS_05 | 当前故障 | 当前故障 | 变频器正常的时候显示无故障,故障发生的时候显 示故障 |
| 先前故障1 | 先前故障1 | ||
| 先前故障2 | 先前故障2 | ||
| 故障记数 | 故障发生的总次数 | 显示故障发生的总次数 | |
| 故障清除 | 故障清除 | 总次数清除为0 |
表2-7-28 故 障 显 示
| 序号 | 故障类型 | LCD显示 | 序号 | 故障类型 | LCD显示 |
| 1 | U相过流 | OC-U | 10 | 编码器故障 | Encoder Err |
| 2 | V相过流 | OC-V | 11 | 直流连接电压欠压 | Low Voltage |
| 3 | W相过流 | OC-W | 12 | 接地故障 | Ground Fault |
| 4 | 保险丝断 | Fuse Open | 13 | 变频器过热 | Inv Overheat |
| 5 | 直流连接电压过压 | Over Voltage | 14 | 电子热保护 | E-Thermal |
| 6 | U相IGBT短路 | Arm Short-U | 15 | 过载保护 | Over Load |
| 7 | V相IGBT短路 | Arm Short-V | 16 | 外部输入-B保护 | Ext-B Trip |
| 8 | W相IGBT短路 | Arm Short-W | 17 | 选项板错误 | Option Err |
| 9 | DB上IGBT短路 | Arm Short-DB | 18 | 变频器过载保护 | Inv OLT |
续表
| 序号 | 故障类型 | LCD显示 | 序号 | 故障类型 | LCD显示 |
| 19 | 电动机过热 | Mot Overheat | 21 | 电机端子传感器开路 | Mot THR Open |
| 20 | 变频器端子传感器开路 | Inv THR Open | 22 | 电动机失速 | Over Speed |
需要注意,如果在同一时间发生了2个以上的故障,最后发生的故障优先显示,其他故障在DIS_05中记录。
5.DIS_06 (用户组显示 Enable/Disable)
用户功能代码频繁使用出现用户组。依靠在DIS_06中的设置,可以显示只有用户组的单一模式,可以只显示显示组和用户组,可以显示包括用户组在内的所有组,见表2-7-29。
表2-7-29 DIS_06 显 示
| 代码序号 | LCD显示 | 功 能 | 描 述 | |
| DIS_06 | Usr Grp Disp | 用户组显示 Enable/Disable | Not Used | 不显示用户组 |
| Dis+Usr Grp | 仅显示显示组和用户组 | |||
| Display ALL | 包括用户组在内的所有组显示,当使用第2功 能的时候显示第2功能组,当选项板安装在主控 制板上时显示外部组 | |||
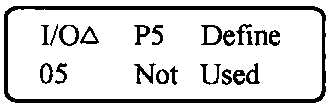
图2-7-46 跳转功能
(二) I/O组 (I/O_00)
1.跳转功能 (I/O_00)
使用I/O_00,可以跳跃到想到的代码处。
【例】 想跳跃到I/O_05。按 [PROG] 键之后,使用 [SHIFT/ESC] / [▲ (Up)] / [▼ (Down)] 键设置5,然后按 [ENT] 键。如果无法找到跳跃的代码数,自动选择最近的代码显示。
可以使用 [▲ (Up)] / [▼ (Down)] 键查阅其他代码。
2. 多功能数字输入端子
(1) I/O_01~I/O_07 (多功能数字输入端子P1~P7定义)。多功能数字输入端子定义解释如下。标准I/O板 (SIO) 和扩展I/O板 (EIO) 各有7个多功能数字输入端子P1~P7。每个端子仅可以使用下面表格显示的功能中的一种功能。任何两个端子不能同时设置为一个相同的功能。如果同时使用,最后的端子自动改变为 “不使用”,而且在运行过程中端子功能不能被修改。参见表2-7-30。
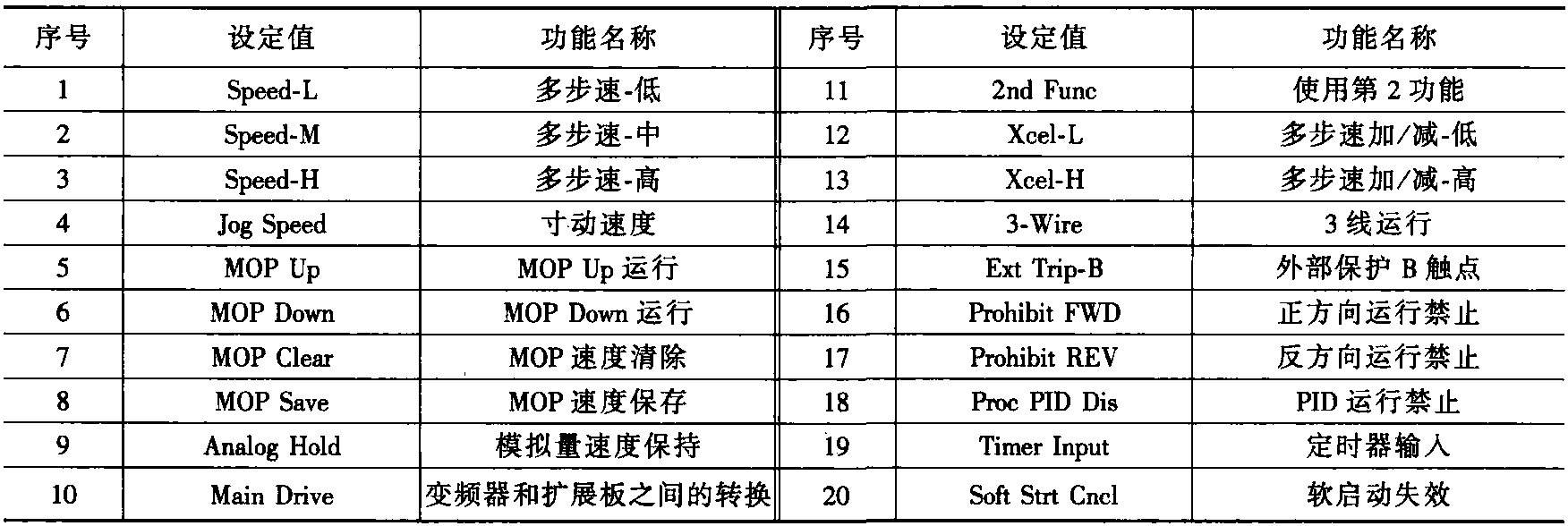
表2-7-30 多功能数字输入端子
续表
| 序号 | 设定值 | 功能名称 | 序号 | 设定值 | 功能名称 |
| 21 | ASR Gain Sel | ASR-PI增益转变 | 25 | Spd/Trq Sel | 速度/转矩控制 |
| 22 | ASR P/PI Sel | ASR-P/PI转变 | 26 | Use Max Trq | 最大转矩 |
| 23 | Flux Ref Sel | 设置磁通量值 | 27 | Use Trq Bias | 转矩补偿 |
| 24 | Pre Excite | 预先注入励磁 |
1) 多步速—低;
2) 多步速—中;
3) 多步速—高;
4) 寸动运行;
如果多功能数字输入端子P1~P7选择为Speed-L、Speed-M和Speed-H或Jog Speed,根据端子结合情况,在FUN_12~20中使用多步速0~7值和寸动速度指令作为一个速度指令使电动机旋转。
多功能输入端子P1、P2、P3分别设置为Speed-L、Speed-M和Speed-H,P4设置为Jog Speed的情况下,见表2-7-31。
表2-7-31 设 置 代 码 显 示
| 代码序号 | LCD显示 | 描 述 | 设定范围 | 单 位 | 功 能 |
| I/O_01 | P1定义 | 多功能输入P1定义 | Speed-L | ||
| I/O_02 | P2定义 | 多功能输入P2定义 | Speed-M | ||
| I/O_03 | P3定义 | 多功能输入P3定义 | Speed-H | ||
| I/O_04 | P4定义 | 多功能输入P4定义 | Jog Speed |
表2-7-32是多步速指令和P1、P2和P3的结合。如果选择多步速0 (P1,P2和P3都是OFF),通过键盘 (FUN_12) 数字速度设置对速度模式中的一个进行设置,模拟速度设置由控制电路端子设置,选项设置速度。当P4设置为寸动速度的情形下,对于其他端子设置的速度而言,优先寸动速度。这种情况下,FUN_20下可定义寸动速度的指令值,见表2-7-32。
表2-7-32 设 置 速 度 值
| P1 | P2 | P3 | P4 | 设置速度值 |
| OFF | OFF | OFF | OFF | FUN_02中的设置指令 |
| ON | OFF | OFF | OFF | FUN_13 |
| OFF | ON | OFF | OFF | FUN_14 |
| ON | ON | OFF | OFF | FUN_15 |
| OFF | OFF | ON | OFF | FUN_16 |
| ON | OFF | ON | OFF | FUN_17 |
| OFF | ON | ON | OFF | FUN_18 |
| ON | ON | ON | OFF | FUN_19 |
| X | X | X | ON | FUN_20 |
5) MOP Up;
6) MOP Down;
7) MOP Clear;
8) MOP Save。
如果多功能输入端子P1~P7定义为MOP Up和MOP Down,根据这些端子的输入条件,可以进行加速/减速/恒速运行。通常情况下,如果对于速度的变化必须要有一个端子ON/OFF动作,使用MOP运行。对于在FUN_02中选择速度设置而言,MOP功能有很高的优先权。因此,一旦选择MOP Up/Down功能,此功能将无条件运行且FUN_02中的设置值无效。因此,如果取消此功能,端子的功能定义要分别从MOP Up/Down改变为Not Used。如果该功能伴随Main Drive功能一起使用,操作指令来自MOP,其他的功能都和当前 ‘Main Drive’ 功能一样。这个功能中的速度上限值在 (FUN_04) 最大电动机速度中设置。如果MOP保存,当前的速度指令也作为MOP数据保存,MOP数据象速度指令等都是在MOP运行中使用的。另一方面,MOP清除则MOP数据也清除到0,MOP清除将会改变所保存的数据。
a.MOP功能设置距离见表2-7-33。
表2-7-33 MOP功能设置距离
| 代码序号 | LCD显示 | 描 述 | 设置范围 | 单 位 | 设置数据 |
| I/O_01 | P1定义 | 多功能输入P1定义 | MOP Up | ||
| I/O_02 | P2定义 | 多功能输入P2定义 | MOP Down | ||
| I/O_03 | P3定义 | 多功能输入P3定义 | MOP Clear | ||
| I/O_04 | P4定义 | 多功能输入P4定义 | MOP Save |
b.MOP Up/Down运行的图例见图2-7-47。
c.MOP保存实例。端子输入赋值到MOP保存功能是ON的情况,当再次运行时,运行速度立即保存并作为保存速度开始运行,MOP保存图例见图2-7-48。
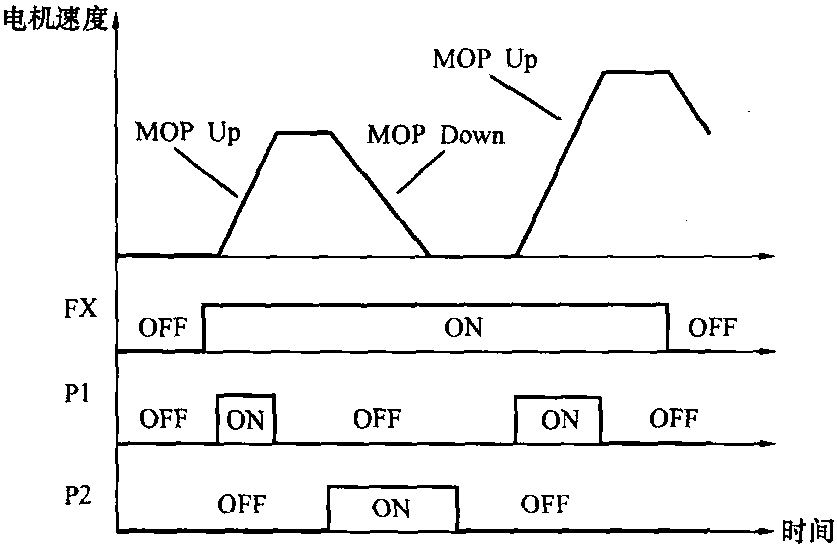
图2-7-47 MOP Up/Down运行
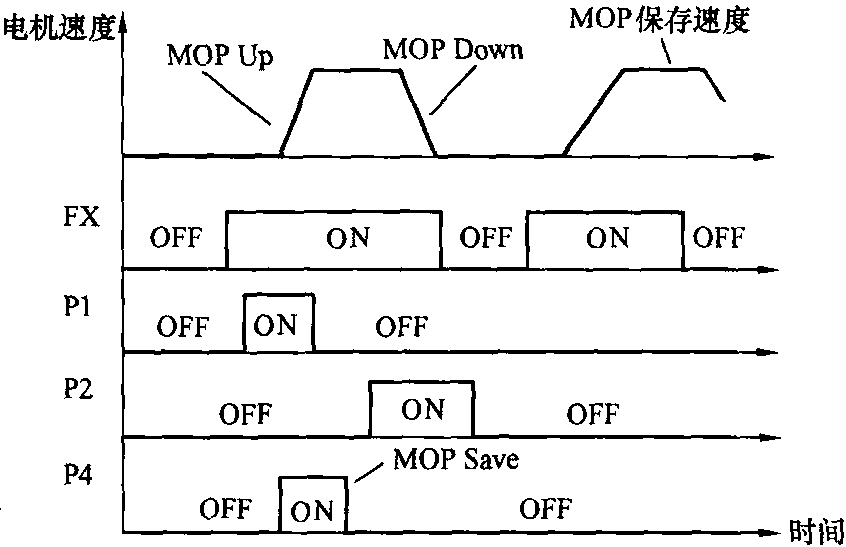
图2-7-48 MOP保存
d. MOP清除实例。如果通过MOP保存功能保存的记忆速度被清除了,MOP清除是ON。在运行期间ON,电机减速到停止。另外清除速度指令为0,见图2-7-49。
9) 模拟保持。如果速度选择方式 (FUN_02) 设置为模拟,多功能输入端子中一个设置为模拟保持,则当端子开关ON之后,模拟速度指令立即执行并且一直保持。可以使用在一个不需要指令变化的恒速范围内。这个功能应用在由于电磁干扰导致模拟速度指令非常容易改变的区域非常有效,见图2-7-50。
10) 主驱动。这个功能应用在变频器保持单一运行。选项板安装或者设置诸如RUN/STOP指令方式选择,速度设置方式选择和转矩指令方式等等可以由用户自行任意设置,端子赋值为 “Main Drive”并开关为ON,变频器转换为手动操作模式。在手动操作模式下,仅可以通过键盘设置RUN/STOP指令方式选择,速度设置方式选择,转矩指令方式。端子赋值为 “Main Drive”并开关为OFF,恢复成初始设置值,尽管仅可以通过键盘激活操作,并当此功能为ON的时候可改变RUN/STOP指令方式选择,速度设置方式选择,转矩指令方式。但这些参数不能被修改并一直保持。电动机停止时才能设置开关的ON/OFF。但是当端子设置为第2功能开关ON/OFF,控制模式可以改变。当Main Drive是On时不能改变的代码见表2-7-34。
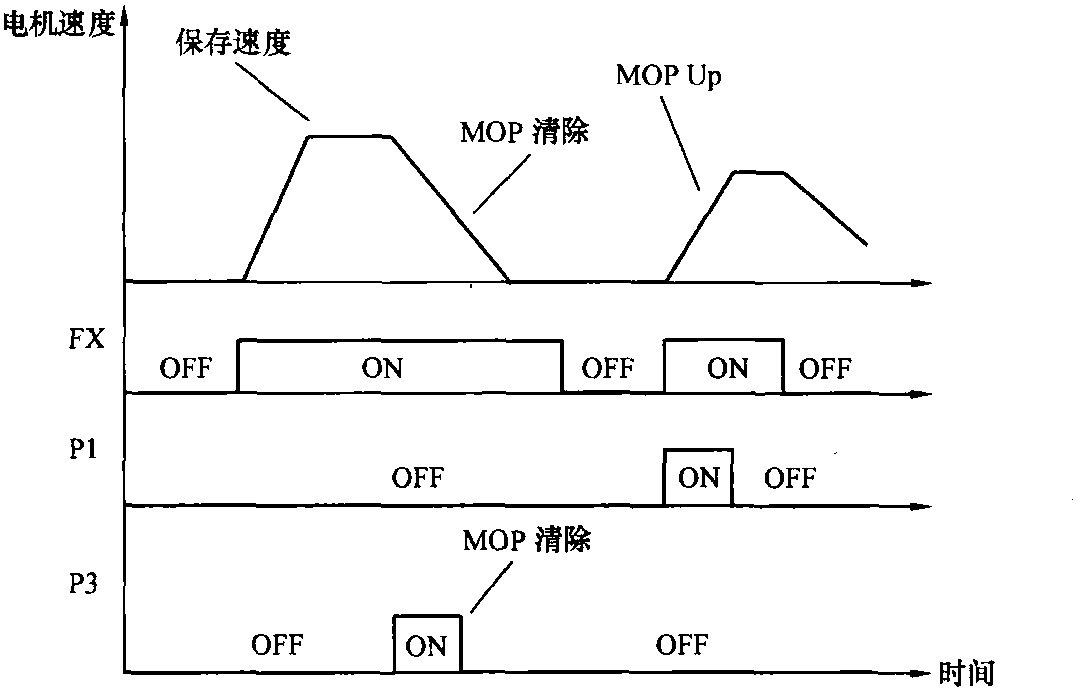
图2-7-49 MOP清除
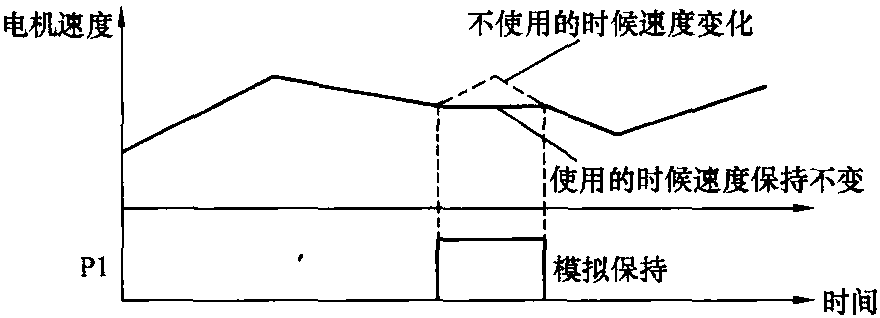
图2-7-50 模拟保持
表2-7-34 当 “Main Drive”是ON时不能改变的代码
| 代码序号 | 功 能 | 备 注 |
| FUN_01 | RUN/STOP指 令方式选择 | |
| FUN_02 | 速度设置方式选择 | |
| CON_01 | 控制模式选择 | 当开关设置为第 2功能时可以改变 |
| CON_25 | 给定转矩方式 |
11)第2功能 (第2功能设置)。当两个不同的电动机连接在一个变频器时,交替运行操作的时候,这个功能可以用来设置第2电动机的参数。如果多功能端子中没有设置第2功能,键盘上不会出现第2功能组的设置。在多功能端子中没有设置第2功能或者该端子没有ON,第1功能有效。如果设置了第2功能且端子开关为ON,第2功能有效。其他上边没有涉及到的参数也可以在第2功能中使用。关于第1、第2功能的相同参数设置如表2-7-35所示。
表2-7-35 第1、第2功能的相同参数设置
| 项 目 | 第2功能 | 第1功能 | ||
| 加速时间 | 2nd_09 | 第2功能加速时间 | FUN_40 | 加速时间1 |
| 减速时间 | 2nd_10 | 第2功能减速时间 | FUN_41 | 减速时间1 |
| 编码器 | 2nd_12~2nd_15 | PAR_10~PAR_13 | ||
| 电动机参数 | 2nd_17~2nd_27 | PAR_17~PAR 30 | ||
| 1min电子热 保护等级 | 2nd_32 | 第2功能1min电子 热保护等级 | FUN_55 | 1min电子 热保护等级 |
| 电子热保护持续等级 | 2nd_33 | 第2功能电子热保 护持续等级 | FUN_56 | 电子热保护持续等级 |
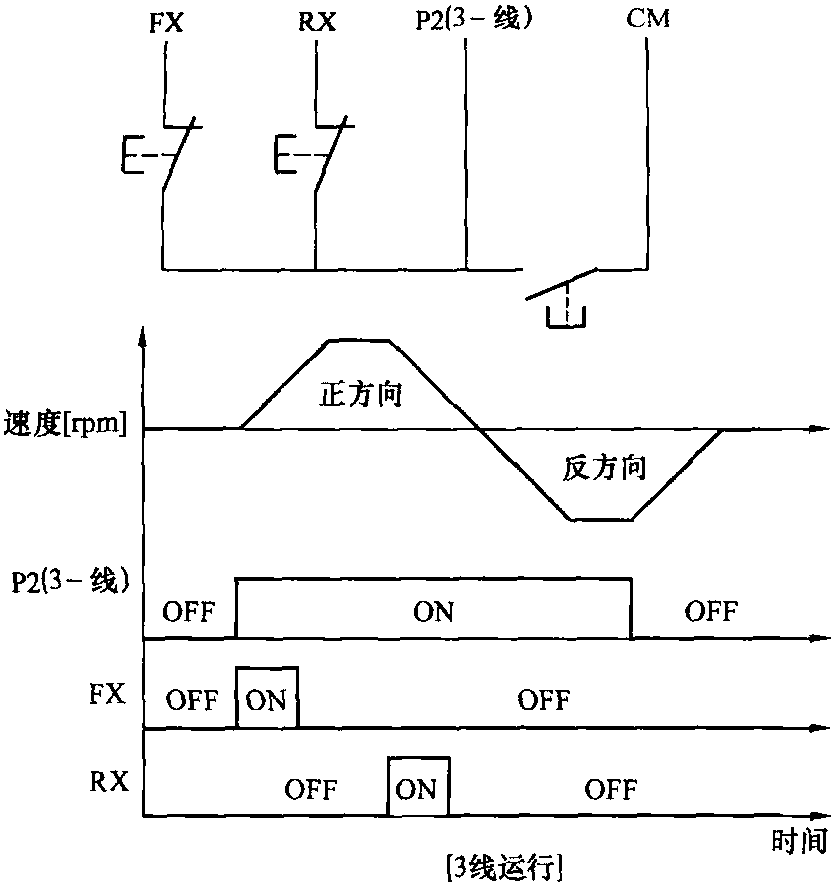
图2-7-51 顺序控制电路
此外,需要注意两点:
a.电动机停止时,第1和第2功能ON/OFF开关可以动作。
b.除非电动机停止,运行期间开关ON/OFF无效。
12) XCEL_L。
13) XCEL_H。查阅FUN_38~45 [1,2和3加速/减速时间]。
14) 3-线运行。当FX或RX端子ON/OFF时,这个功能能够独立的保证当前频率的输出 (ON),图2-7-51所示的是简单的使用3线按钮开关的顺序控制电路 (P2设置为3线运行的情形下如何运行变频器)。
15) Ext Trip-B (B触点外部保护信号输入)。如果设置这个功能的端子是OFF,变频器IGBT失效,电动机将自由运行到停止。LCD屏幕上显示“External Trip Signal B contact”信息,键盘上STOP灯闪烁。这个信号可以用作外部闭锁保护功能。
16) Prohibit FWD (正方向旋转禁止)。
17) Prohibit REV (反方向旋转禁止)。如果设置了Prohibit FWD或Prohibit REV,将分别禁止正方向或反方向旋转。如果使用Prohibit FWD,速度指令将由正值变为0。同样,如果使用Prohibit REV,速度指令将由负值变为0。
【例】 多功能输入端子P1设置为Prohibit FWD,P2设置为Prohibit REV,图2-7-52显示的是使用这种功能时如何运行变频器。
18) Proc PID Dis (过程PID控制)。这个功能用于过程PID控制。如果在CON_20上是ON,且端子也是ON,过程PID控制输出为0。控制器运行决定过程PID控制,在CON_20中决定是否使用此功能。代码设置见表2-7-36。
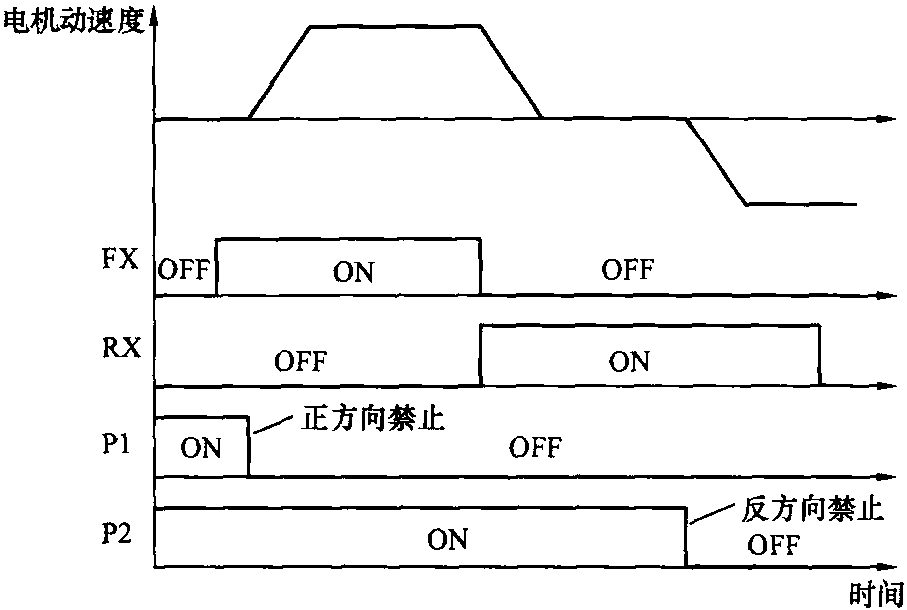
图2-7-52 使用Prohibit KEV运行变频器
表2-7-36 代 码 设 置
| 代码序号 | LCD显示 | 功能描述 | 设定范围 | 单 位 | 出厂设置 |
| CON_20 | Proc PID Enb | 过程PID控制 | 无效 有效 端子 | 无效 |
过程PID控制在CON_20设置Disable时无效,设置Enable时有效。如果设置Terminal,多功能端子设置Proc PID Dis决定过程PID控制输出是否有效。在过程PID控制的预先设置中,仅当多功能输入端子设置为Proc PID Dis,端子输入是OFF,操作指令是ON,过程PID控制有效。如果操作指令不是ON或者Process PID Enable没有设置,过程PID控制不工作,具体如表2-7-37所示。
表2-7-37 过 程
| CON_18 | 多功能端子Proc PID Dis | 操作指令 | CON_18 | 多功能端子Proc PID Dis | 操作指令 | ||
| 输入信号 | ON | OFF | 输入信号 | ON | OFF | ||
| 端子 | ON | 无效 | 无效 | 有效 | 有效 | 无效 | |
| OFF | 有效 | 无效 | 无效 | 无效 | 无效 | ||
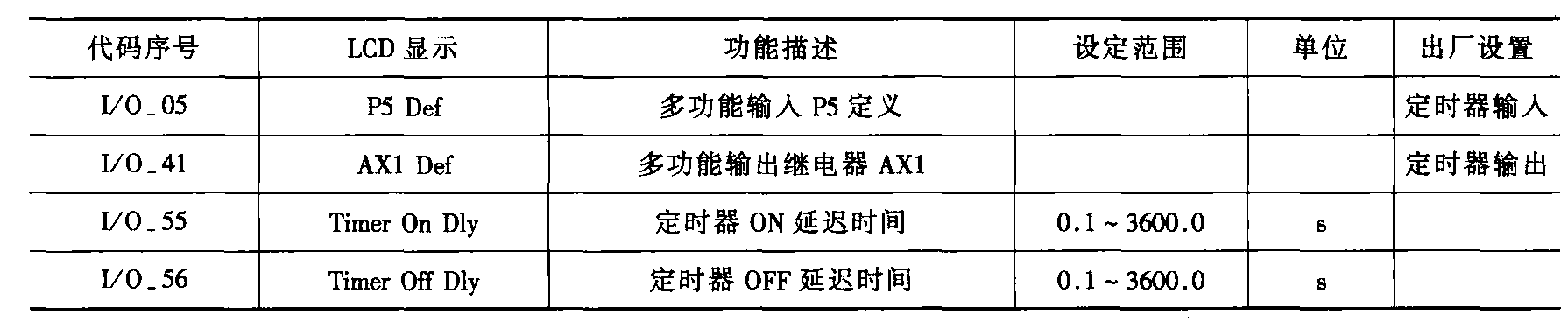
19) 定时器输入。在I/O_55中设置延迟开通时间和I/O_56中设置延迟关断时间,根据时间设置多功能输入端子P1~P7执行定时器输出。表2-7-38、图2-7-53中I/O_05设置为定时器输入,多功能输出端子AX1在I/O_40上设置为 ‘Timer Out’。
表2-7-38 定时器输入设置
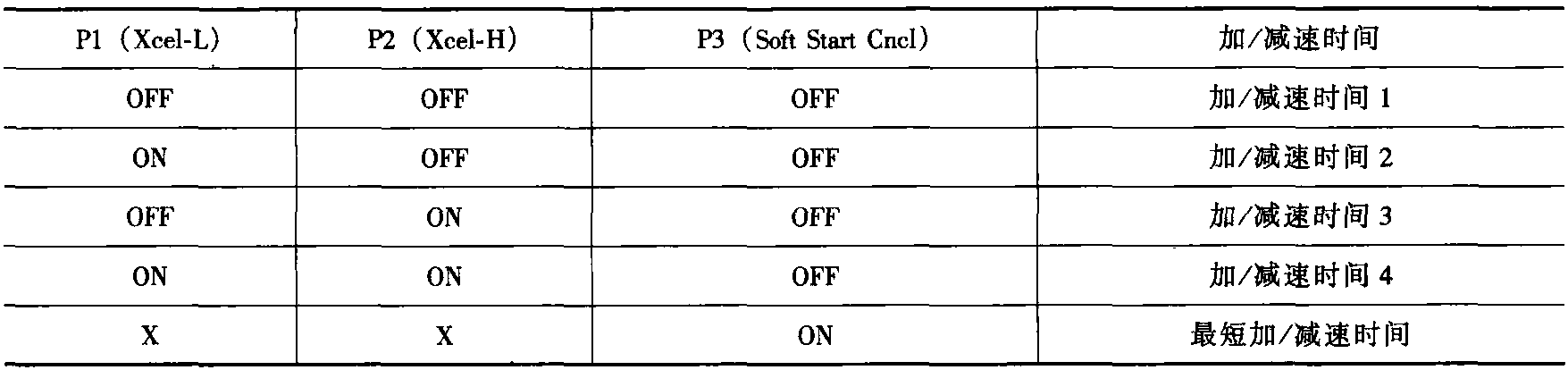
20) Soft Start Cncl (软启动取消)。当要求不使用设定的加/减速时间,加/减速时间很短的时候使用这个功能。这种情况下,真实的加/减速时间依赖于负载条件和速度控制器的回应情况。表2-7-39显示的是当使用P1、P2和P3为加/减速时间或软启动取消功能时的不同加/减速时间。
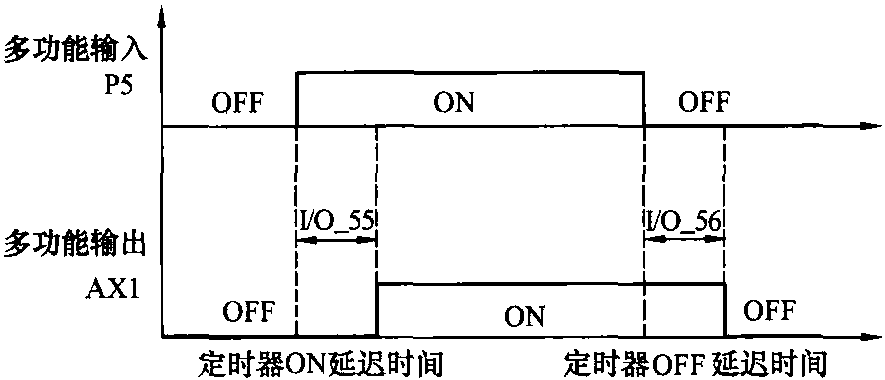
图2-7-53 定时器输入
表2-7-39 软启动取消时的加/减速时间
21) ASR Gain Sel (ASR增益)。使用 ‘ASR Gain Sel’ 功能,P和I增益可以在PI速度控制器 (ASR) 中选择。参见表2-7-40。
22) ASR P/PI Sel (ASR P/PI)。通过使用 ‘ASR P/PI Sel’ 功能,P控制开关选择PI速度控制器,见表2-7-41。
表2-7-40 ASR 增 益
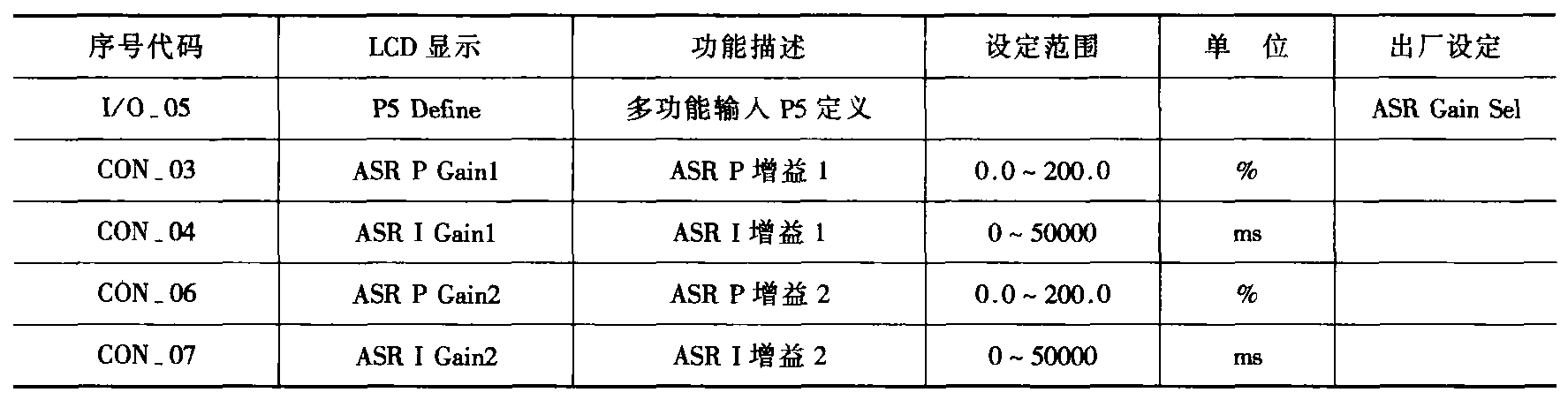
表2-7-41 ASR P/PI Sel功能设置

23) Flux Ref Sel (给定磁通量选择)。如果设定磁通量选择是ON,设定磁通量设定的值是额定磁通量的修改值,磁通量设置值的设定根据模拟电压 (-10~10V) 和额定磁通量的百分率之间的转换。
24) Pre Excite(励磁预先注入)。在运行指令设定为ON之前,向电动机注入励磁电流以增强磁通量,这样可以改善电机的加速时间。
25) Spd/Trq Sel(速度/转矩控制)。速度控制和转矩控制之间的转换可以用到此功能,这个功能端子的使用可以使键盘输入无效。
26) Use Max Torque(最大转矩有效)。如果输入为ON,速度控制时转矩的最大值,相反,当输入为Off,根据转矩设置范围在CON_28~30内设置该值。
27) Use Trq Bias(转矩补偿有效)。多功能端子 (P1~P7) 某一个端子设置为 “Use Trq Bias”,转矩补偿值注入变频器。如果 “Use Trq Bias”没有设置并且CON_31设置为 ‘Keypad’,如果在CON_32设置为转矩补偿时变频器不管端子状态就可以进行转矩补偿。因此,即使CON_31设置为 ‘NONE’ 或者多功能端子 (P1~P7) 设置为 “Use Trq Bias”且端子打开,转矩补偿也同样进行。
(2) I/O_08 (多功能输入端子的反方向运行)。多功能输入端子是在A触点基础上运行。如果一个特殊的端子改变为B触点运行,相关的端子设置要从 ‘0’ 变为 ‘1’,一旦相关的端子设置为 ‘1’,端子将在 ‘B’ 触点上一直运行到再次改变为 ‘0’。但是在‘B’ 触点为外部保护时,应该改为 ‘A’触点运行。端子按照P1,P2,P3,P4,P5,P6和P7从头开始的顺序显示,见图2-7-54。
P1~P7:A触点
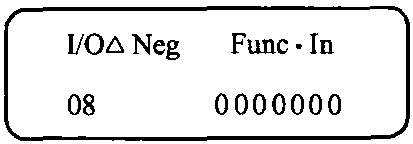
P1,P6:B触点
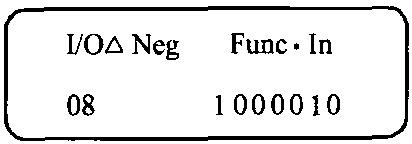
图2-7-54 多功能输入端子的反方向运行
(3) I/O_09(端子的滤波时间常数)。这个设置影响了控制回路端子 (FX,RX,BX,P1~P7,RST) 的反应速度。在消除输入信号中的电磁干扰信号非常有效。时间常数越大,响应时间越慢。响应速度和设置的时间值2.5 [msec] 大致成比例。
(4) I/O_10(多功能输出端子的反方向运行)。多功能输出端子是在 ‘A’ 触点基础上运行。如果一个特殊的端子改变为 ‘B’触点运行,相关的端子设置要从 ‘0’ 变为 ‘1’,一旦相关的端子设置为 ‘1’,端子将在 ‘B’ 触点上一直运行到再次改变为 ‘0’。端子按照AX1、AX2、OC1、NC、NC从头开始的顺序显示。
3.多功能模拟量输入
AX1~OC1:A触点

AX1~OC1:B触点
图2-7-55 运行多功能输出端子的反方向
(1) I/O_11~40 (多功能模拟量输入定义、增益、偏差和LPF时间常数)。SV-iV5有两种类型的I/O板,标准I/O板 (SIO) 和扩展I/O板 (EIO)。SIO有3个模拟量输入,而EIO有6个模拟量输入。SIO中,AI3可以设置为电动机NTC输入点,AI1和AI2可以设置为电压或电流信号。EIO中,AI6可以设置为电动机NTC输入点,AI1到AI5可以设置为电压或电流信号。控制回路端子上的模拟输入可以用做下面表格中显示的8中功能中的一个功能 (第9功能属于AI3)。电压输入范围是-10~+10V,电流输入范围是4~20mA。模拟输入不能在不同的输入点设置同一个功能。如果2个模拟输入设置了同一个功能,最后设置的模拟输入无效。若模拟输入设置的功能改变,先前设置的参数初始化为0,见表2-7-42。
表2-7-42 多功能模拟量输入描述
| 名 称 | 功 能 | 描 述 |
| Speed Ref | 速度给定 | ±10V输入,相当于最大输入的±100% |
| Proc PID Ref | 过程PID给定 | ±10V输入,相当于过程PID控制给定的±100% |
| Proc PID F/B | 过程PID F/B | ±10V输入,相当于过程PI控制反馈的±100% |
| Draw Ref | 曳引控制给定 | ±10V输入,相当于曳引控制给定的±100% |
| Torque Ref | 转矩给定 | ±10V输入,相当于额定转矩的±100% 通过增益和偏差的调整可以设置到额定转矩的-250%~250% |
| Flux Ref | 磁通量给定 | ±10V输入,相当于额定磁通量的±100% |
| Torque Bias | 转矩补偿 | ±10V输入,相当于额定转矩的±100% 通过增益和偏差的调整可以设置到额定转矩的-250%~250% |
| Torque Limit | 转矩限制 | ±10V输入,相当于额定转矩的±100% 通过增益和补偿的调整可以设置到额定转矩的-250%~250% |
| Use Mot NTC | 电动机NTC输入 | 在SIO中AI3和EIO中AI6使用。电动机端子传感器反馈到端子。 在这个情况下显示电动机温度,电动机过热警报和保护信号。 警告: 这个仅应用在LG Otis矢量控制电动机上 |
相关的多功能模拟输入设置显示在见表2-7-43。
表2-7-43 相关的多功能模拟输入设置显示
| 代码序号 | LCD显示 | 功能描述 | 设定范围 | 单 位 | 出厂设定值 |
| I/O_11 | AI1 Define | 多功能模拟输入AI1定义 | Speed Ref Proc PID Ref Proc PID F/B Draw Ref Torque Ref Flux Ref Torque Bias Torque Limit Use Mot NTC | Speed Ref |
续表
| 代码序号 | LCD显示 | 功能描述 | 设定范围 | 单 位 | 出厂设定值 |
| I/O_12 | AI1 Source | 多功能模拟输入AI1信号定义 | -10~10V 4~20mA 10~0V 20~4mA | -10~10V | |
| I/O_13 | AI1 Gain | AI1输入增益 | 0.0~250.0 | % | 100.0 |
| I/O_14 | AI1 Bias | AI1输入偏差 | -100.0~100.0 | % | 0.0 |
| I/O_15 | AI1 LPF | AI1输入LPF时间常数 | 0~2000 | ms | 0 |
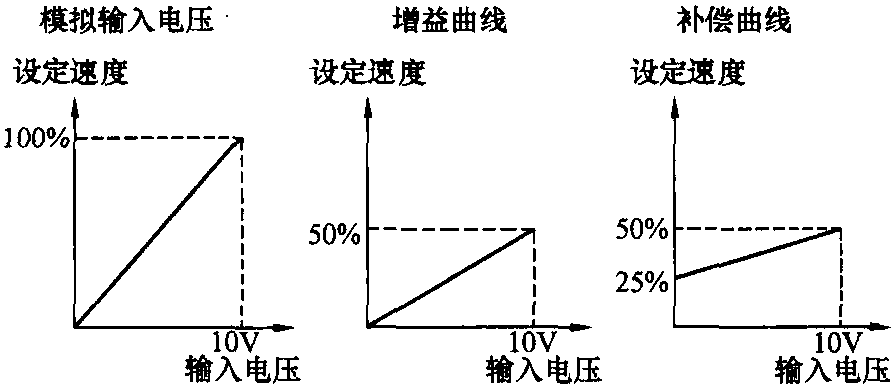
图2-7-56 模拟量不变,改变增益补偿滤波时间
AI1在I/O_16到I/O_40中代码设置是一样的。SIO中是AI1到AI3,EIO中是AI1到AI6。因此,需要3个以上的模拟输入,必须使用EIO。
图2-7-56是模拟量保持不变,改变增益补偿滤波时间的例子,模拟量以50%增益和25%补偿的变化曲线。V1 (0~10V)的值不变。
设定的最大值须根据增益值和偏补偿点的值,如图2-7-56所示,增益最大值设置为50%,补偿点的值为25%。因此,对于模拟输入电压的0~10V对应于速度设定的25%~50%有效。
(2) 键盘控制增益和偏差的调整
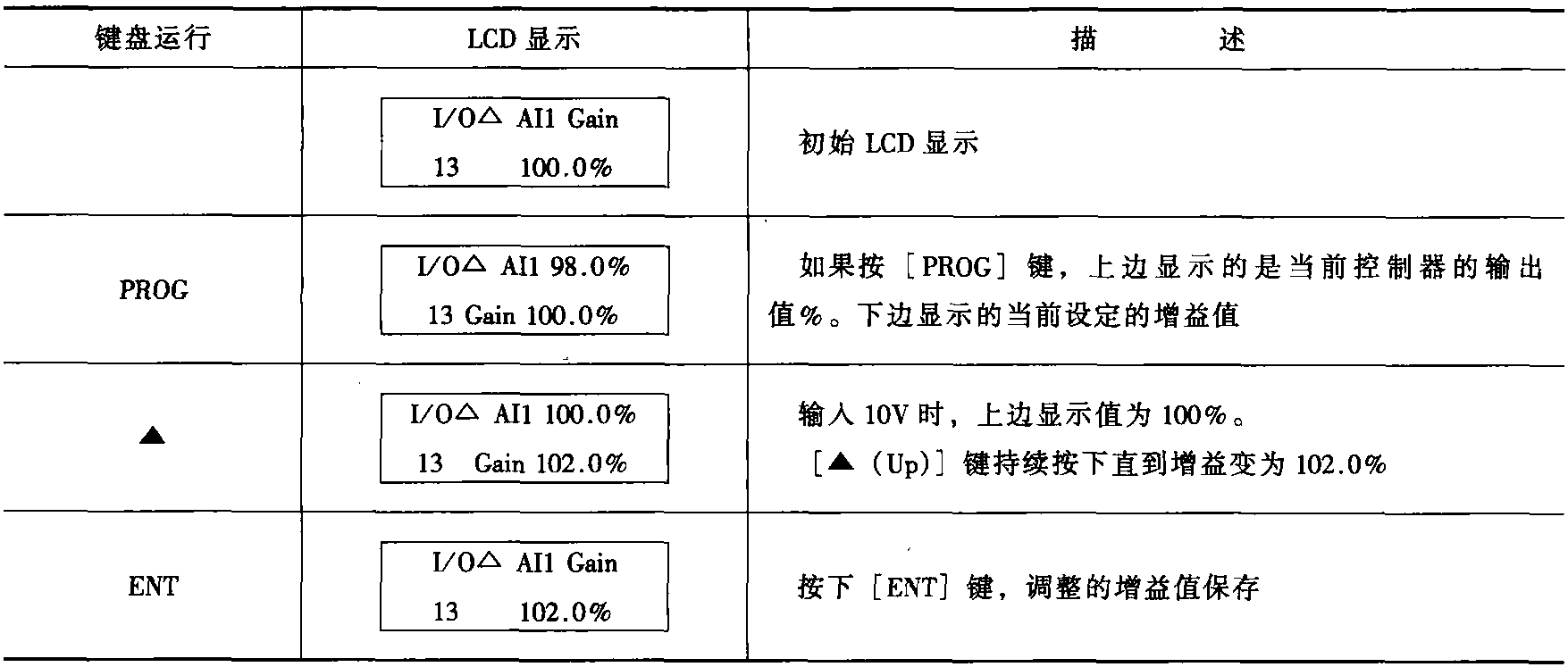
1) 增益调整。AI1端子输入10V时,调整方式见表2-7-44(其他多功能输入端子调整方式相同)。
表2-7-44 AI1端子输入10V时,增益调整方式
2) 偏差调整。AI1端子应用10V时,调整见表2-7-45(其他多功能输入端子调整同样)。
4.多功能数字输出端子
(1) I/O_41~45 [多功能辅助输出 (AX1~AX3) 和集电极开路 (OC1~OC3) 输出]。多功能数字输出端子使用的功能见表2-7-46。
表2-7-45 AI1端子应用10V时,偏差调整
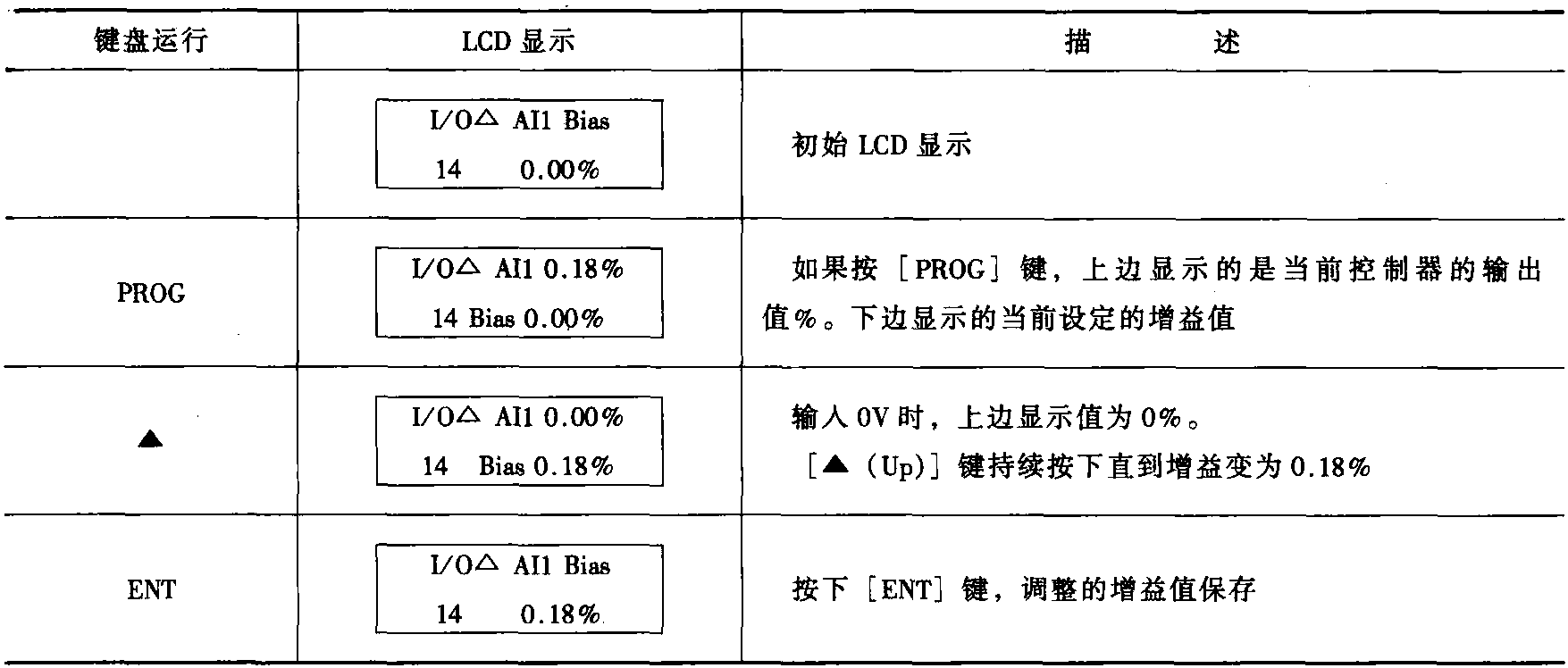
表2-7-46 多功能数字输出端子使用的功能
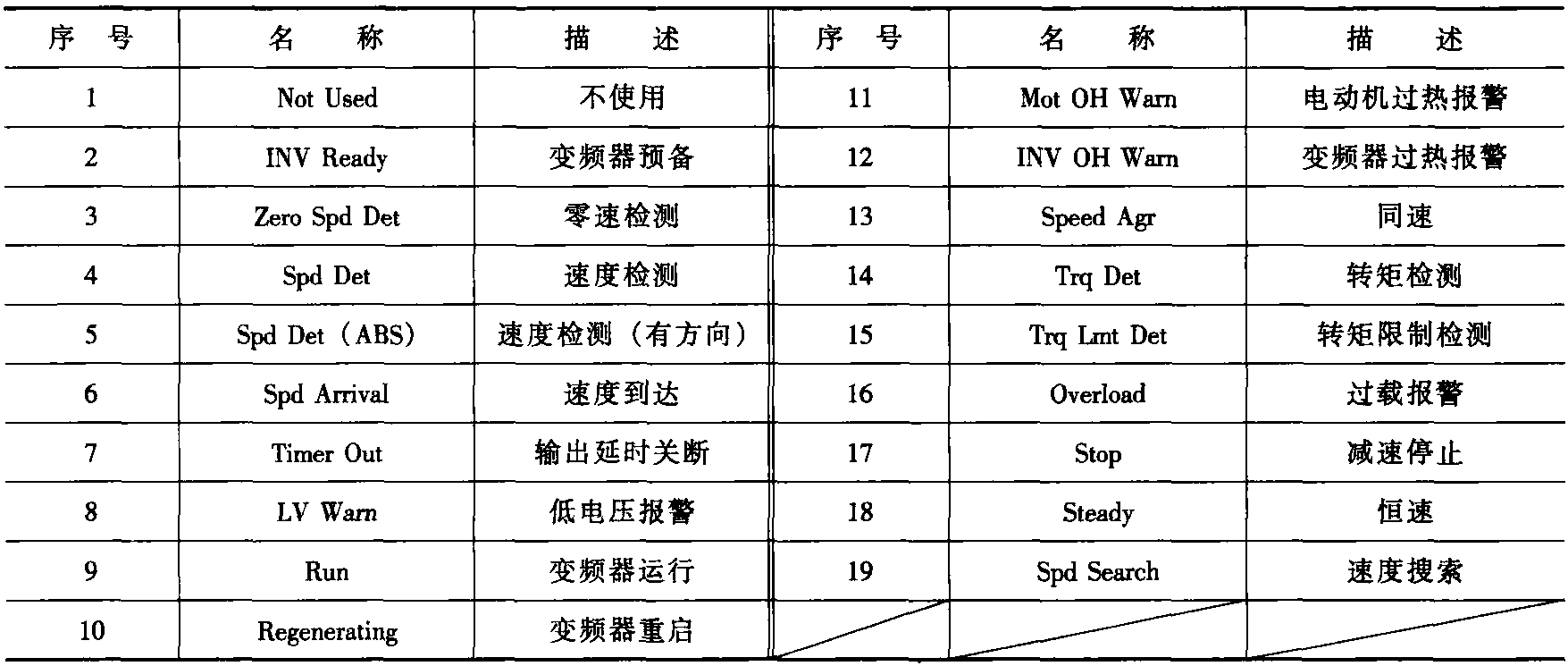
1) 表2-7-46中的功能在多功能输出端子上不能使用。
2) 变频器预备。当变频器刚开始正常运行时,INV Ready信号变为ON,如果故障信号发生时,INV Ready立即断开,如图2-7-57所示。
3) 零速检测。选择零速检测时请参考表2-7-47及图2-7-58。
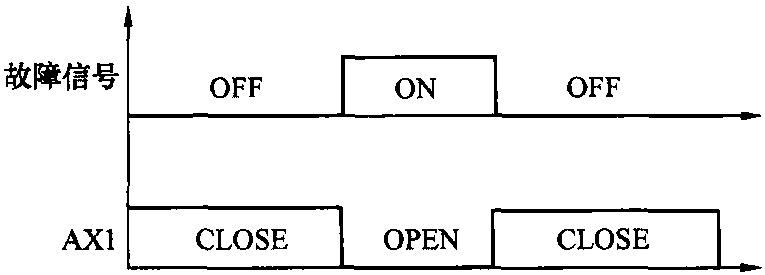
图2-7-57 变频器预备
表2-7-47 零速检测参考表
| 代码 | LCD显示 | 功 能 | 设置范围 | 单 位 | 工厂设置 |
| I/O_47 | ZSD Level | 零速检测等级 | 0.0~360.0 | rpm | 10 |
| I/O_48 | ZSD Band | 零速检测范围 | 0.1~10.0 | % | 0.5 |
4) 速度检测—方向无效。
5) 速度检测 (ABS) —方向有效。当电动机的真实速度达到某一设定速度时,此信号为ON,速度的方向性对Spd Det (ABS) 是有效的,速度的方向性对Spd Det是无效的,见表2-7-48、图2-7-59。
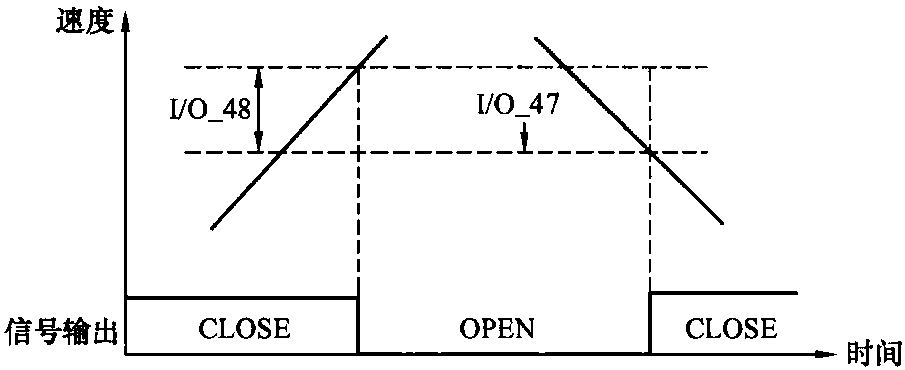
图2-7-58 零速检测
6) 速度到达。检测电动机的速度是否达到设定速度的范围,见表2-7-49。
7) 同速。当电动机的速度达到设定速度时,此信号为ON,见表2-7-50。
8) 延时关断。延时输出也是作为多功能输入端子 (P1~P7) 定义为时间输入的输出信号。在I/O_55中设定延时开通的时间,在I/O_56设定延时关断的时间。表2-7-51是端子的定义和时间的设定。
表2-7-48 速度检测 (ABS) 一方向有效
| 代码 | LCD显示 | 描 述 | 设置范围 | 单 位 | 工厂设置 |
| I/O_49 | SD Level | 任意设定等级 | -3600~3600 | rpm | 0 |
| I/O_50 | SD Band | 任意设定范围 | 0.1~10.0 | % | 0.5 |
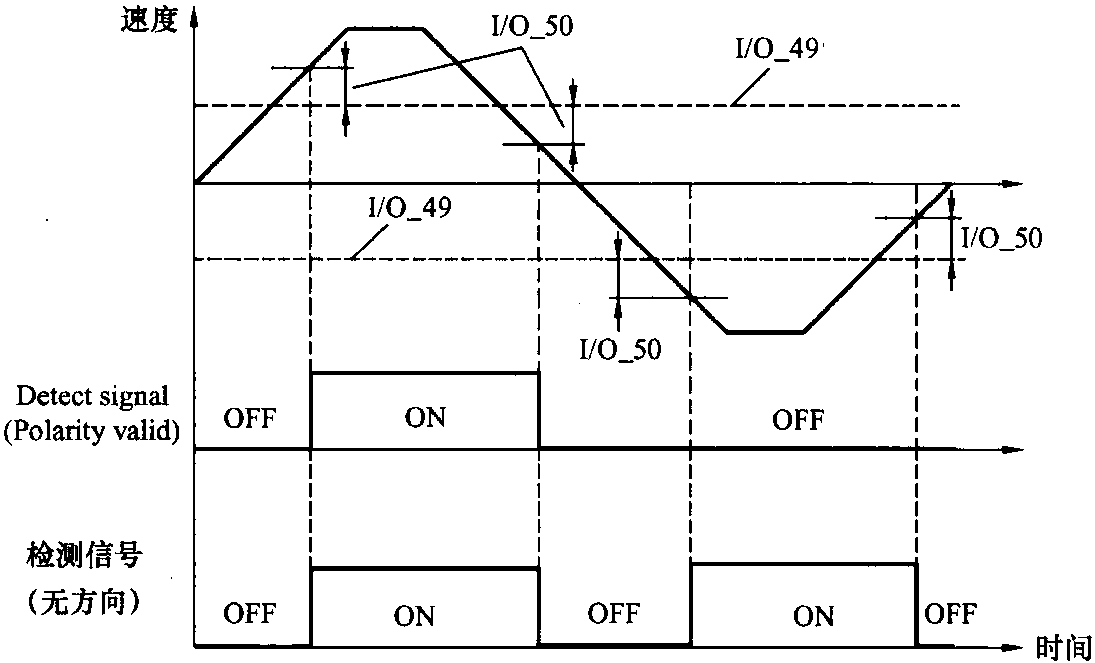
图2-7-59 速度检测 (ABS)—方向有效
表2-7-49 速 度 到 达
| 代码 | LCD显示 | 描 述 | 设置范围 | 单 位 | 工厂设置 |
| I/O_51 | SA Band | 速度到达范围带宽 | 0.1~10.0 | % | 0.5 |
表2-7-50 同速
| 代码 | LCD显示 | 描 述 | 设定范围 | 单 位 | 工厂设置 |
| I/O_52 | SEQ Band | 速度相等 | 0.1~10.0 | % | 0.5 |
表2-7-51 端子定义和时间设定

续表
| 代码 | LCD显示 | 描 述 | 设置范围 | 单 位 | 工厂设置 |
| I/O_55 | Timer On Dly | 延时开通的时间 | 0.1~3600.0 | s | 0.1 |
| I/O_56 | Timer Off Dly | 延时关断的时间 | 0.1~3600.0 | s | 0.1 |
9) 欠压。当变频器的直流侧电压低于检测电压时变频器开始报警。
10) Run。当变频器运转时此信号为ON。
11) 重启动。当电动机重新启动时此信号为ON。
12) 电动机过热。电动机使用NTC信号,当电动机的内部温度高于报警检测等级时,变频器开始报警,此信号仅为报警并不产生故障,见表2-7-52。
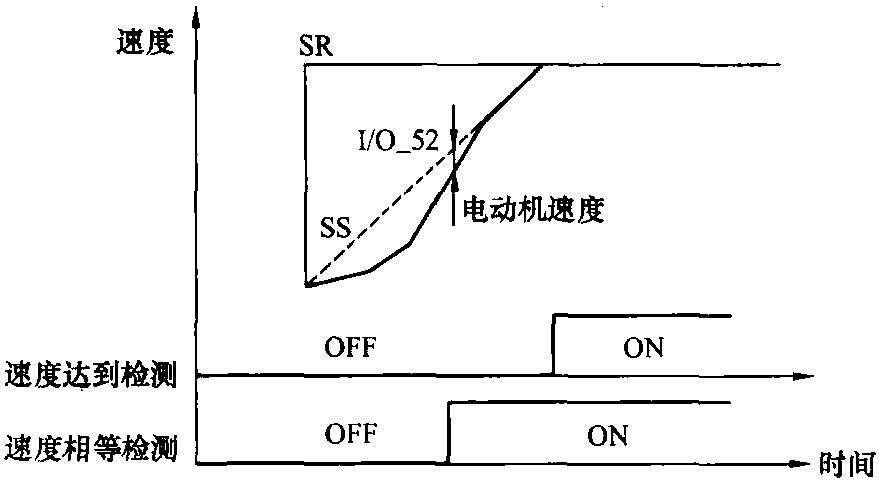
图2-7-60 同速
13) 变频器过热。当变频器过热时此信号为ON,当变频器内部的热量检测元件检测到温度高于报警温度时,变频器开始报警并不产生故障,见表2-7-53。
表2-7-52 电 动 机 过 热
| 代码 | LCD显示 | 描 述 | 设定范围 | 单 位 | 工厂设置 |
| I/O_64 | MH Warn Temp | 过热报警检测温度 | 75~150 | ℃ | 140 |
| I/O_65 | MH Warn Band | 过热报警设定范围 | 0~10 | ℃ | 5 |
表2-7-53 变 频 器 过 热
| 代码 | LCD显示 | 描 述 | 设置范围 | 单 位 | 工厂设置 |
| I/O_62 | IH Warn Temp | 过热报警检测温度 | 55~85 | ℃ | 75 |
| I/O_63 | IH Warn Band | 过热报警检测范围 | 0~10 | ℃ | 5 |
表2-7-54 Trq Det 显 示
| 代码 | LCD显示 | 描 述 | 设定范围 | 单 位 | 工厂设置 |
| I/O_53 | TD Level | 转矩检测等级 | 0.0~250.0 | % | 0 |
| I/O_54 | TD Band | 等级带宽 | 0.1~10.0 | % | 0.5 |
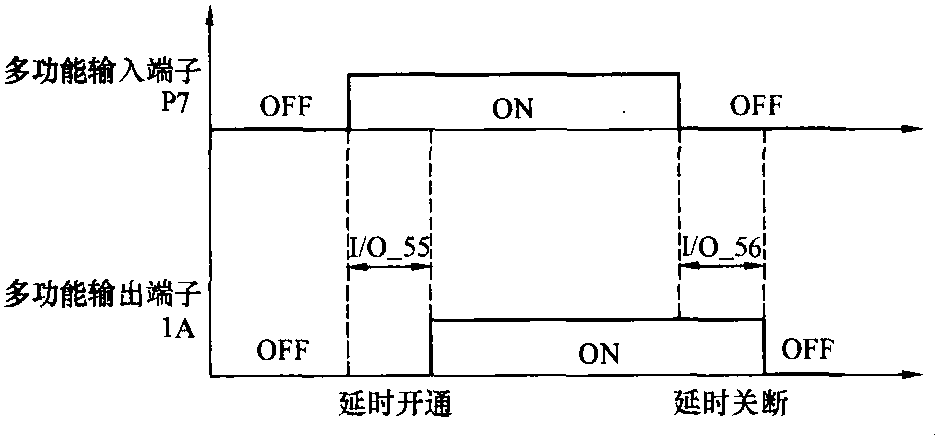
图2-7-61 延时关断
14)Trq Det。当ASR的输出转矩达到设定转矩的等级时,此信号为ON。参见表2-7-54。
15) 转矩限定。由于转矩上限的设定使ASR的输出达到饱和,这时转矩限定信号为ON。
16) 过载。当变频器的输出电流高于过载报警电流时此信号为ON (基于电动机的额定电流),(I/O_57) 此代码设定报警等级,(I/O_58) 此代码设定过载时间。
变频器的电流大于过载等级 (I/O_57),并持续时间超过设定的时间 (I/O_58),报警信号发生,当变频器的输出电流低于过载等级 (I/O_57),并且持续时间大于设定时间 (I/O_58) 时报警信号取消。参见表2-7-55。
多功能输出端子 (AX1,AX2,OC1) 输出报警信号。I/O_41~I/O_45 [多功能辅助输出端子设置] 设置为 ‘OL’ 这个功能。即使过载发生,报警信号通过多功能输出触点输出,但变频器保持运行。
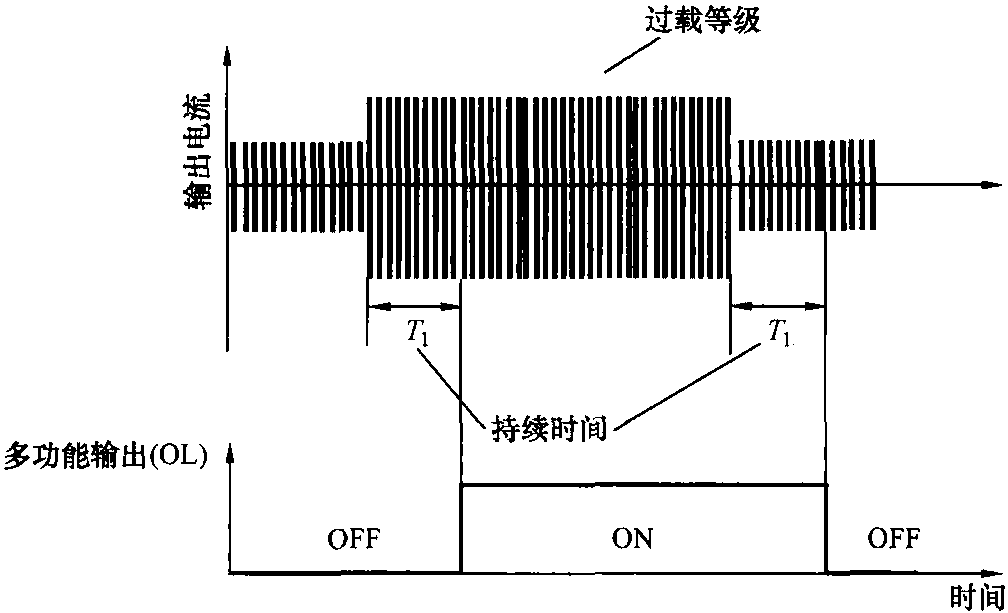
图2-7-62 过载曲线
表2-7-55 过 载 说 明
| 代码 | LCD显示 | 描 述 | 设定范围 | 单 位 | 工厂设置 |
| I/O_57 | OL level | 过载报警等级 | 30~150 | % | 150 |
| I/O_58 | OL time | 过载报警持续时间 | 0~30 | S | 10 |
需要注意: 过载报警等级的百分比是针对电动机的额定电流。
17) 停止。当变频器停止,此信号为ON。
18) 速度恒定。当变频器的运行速度恒定时,此信号为ON。
(2) I/O_46 [故障报警继电器 (30A,30B,30C) 选择]。当变频器的故障信号发生时被选择的触点动作。通过多个位的组合故障报警触发也不同,有关的位: 欠压变频器故障和重启次数,详见表2-7-56~表2-7-58。
(3) I/O_59~61 (过载有效、等级、时间)。变频器的输出电流高于过载等级并且超过持续时间,变频器断开IGBT的导通并显示故障信息。参见表2-7-59。
表2-7-56 I/O_46 设 置 说 明
| 代码 | LCD显示 | 描 述 | 设置范围 | 单 位 | 工厂设置 |
| I/O_46 | Relay mode | 继电器代码 | 000~111 | 011 |
表2-7-57 I/O_46 的 位
| 代 码 | 位2(自动重启的次数) | 位1 (变频器故障) | 位0(欠压) |
| I/O_46 | 0/1 | 0/1 | 0/1 |
表2-7-58 位 的 说 明
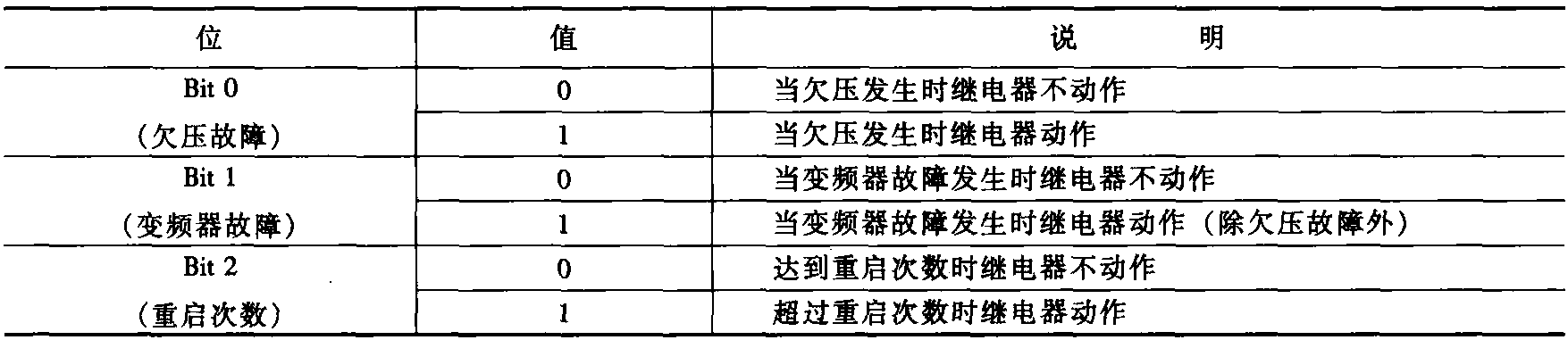
表2-7-59 I/O
| 代码 | LCD显示 | 描 述 | 设定范围 | 单 位 | 工厂设定 |
| I/O_59 | OLT Select | 过载使能位 | Yes No | — | Yes |
| I/O_60 | OLT Level | 过载等级 | 30~200 | % | 180 |
| I/O_61 | OLT Time | 过载持续时间 | 0~60 | s | 60 |
值得注意的是过载报警等级的百分比是针对电动机的额定电流设定的。
5.模拟量输出
标准I/O板有2路输出,扩展I/O板有3路输出。因此,当需要3路输出时须用扩展板,见表2-7-60。
关于参数的设置情况见表2-7-61。
表2-7-60 模拟量输出参数
| 代码 | LCD显示 | 描 述 | 设定范围 | 单 位 | 工厂设置 |
| I/O_66 | AO1 Def | 模拟量输出1的定义 | Motor Speed | ||
| I/O_67 | AO1 Gain | 模拟量输出1的增益 | 0.0~250.0 | % | 100.0 |
| I/O_68 | AO1 Bias | 模拟量输出1的补偿 | -100.0~100.0 | % | 0.0 |
| I/O_69 | AO2 Def | 模拟量输出2的定义 | |||
| I/O_70 | AO2 Gain | 模拟量输出2的增益 | 0.0~250.0 | % | 100.0 |
| I/O_71 | AO2 Bias | 模拟量输出2的补偿 | -100.0~100.0 | % | 0.0 |
| I/O_72 | AO3 Def | 模拟量输出3的定义 | |||
| I/O_73 | AO3 Gain | 模拟量输出3的增益 | 0.0~250.0 | % | 100.0 |
| I/O_74 | AO3 Bias | 模拟量输出3的补偿 | -100.0~100.0 | % | 0.0 |
表2-7-61 参数的设置情况
| 项 目 | 描 述 | 输出信号等级 |
| AiX Value | 模拟输入值 | ±10V: 10V,20mA |