今天小编要和大家分享的是tl494,pwm,滤波器相关信息,接下来我将从用PWM控制集成电路TL494实现单回路控制器,电子/电路 基于tl494芯片pwm控制电路工作原理分析与检测 器外置振荡这几个方面来介绍。

电子/电路 基于tl494芯片pwm控制电路工作原理分析与检测 器外置振荡
本文介绍了以电压驱动型脉宽调制控制集成电路TL494为核心元件并加上简单滤波电路及RC放电回路所构成的回路控制器。它能把脉冲宽度变化的信号转换成与脉冲宽度成正比变化的直流信号,进而实现闭环单回路控制。
TL494是美国德州仪器公司生产的一种电压驱动型脉宽调制控制集成电路,主要应用在各种开关电源中。本文介绍它与相应的输入、输出电路等一起构成一个单回路控制器。
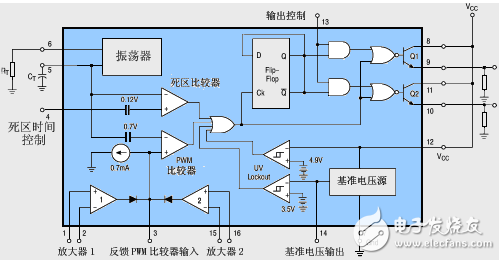
1 TL494管脚配置及其功能
TL494的内部电路由基准电压产生电路、振荡电路、间歇期调整电路、两个误差放大器、脉宽调制比较器以及输出电路等组成。图1是它的管脚图,其中1、2脚是误差放大器I的同相和反相输入端;3脚是相位校正和增益控制;4脚为间歇期调理,其上加0~3.3V电压时可使截止时间从2%线怀变化到100%;5、6脚分别用于外接振荡电阻和振荡电容;7脚为接地端;8、9脚和11、10脚分别为TL494内部两个末级输出三极管集电极和发射极;12脚为电源供电端;13脚为输出控制端,该脚接地时为并联单端输出方式,接14脚时为推挽输出方式;14脚为5V基准电压输出端,最大输出电流10mA;15、16脚是误差放大器II的反相和同相输入端。
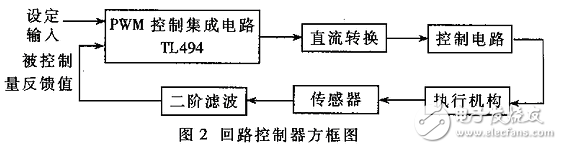
2 回路控制器工作原理
回路控制器的方框图如图2所示。被控制量(如压力、流量、温度等)通过传感器交换为0~5V的电信号,作为闭环回路的反馈信号,通过有源简单二阶低通滤波电路进行平滑、去除杂波干扰后送给TL494的误差放大器I的IN+同相输入端。设定输入信号是由TL494的5V基准电压源经一精密多圈电位器分压,由电位器动端通过有源简单二阶低通滤波电路接入TL494的误差放大器I的IN-反相输入端。反馈信号和设定信号通过TL494的误差放大器I进行比较放大,进而控制脉冲宽度,这个脉冲空度变化的输出又经过整流滤波电路及由集成运算放大器构成的隔离放大电路进行平滑和放大处理,输出一个与脉冲宽度成正比的、变化范围为0~10V的直流电压。这个电压就是所需要的输出控制电压,用它去控制执行电路,及时调整被控制量,使被控制量始终与设定值保持一致,形成闭环单回路控制。
2.1 输入电路
两个运算放大器IC1A、IC1B都接成有源简单二阶低通滤电路,分别作为反馈信号输入和设定信号输入的处理电路。在电路设计上,两个输入电路采取完全对称的形式。将有源简单二阶低通滤波电路的截止频率fp设计为4Hz,根据有源简单二阶低通滤波电路中fp=0.37f0(f0为该滤波器的特征频率)选取C1与C2为1μF,然后算得R1与R2为16kΩ。这样可以滤除由于传感器距离较远输入引线过长而带来的高频杂波干扰和平滑传感器信号本身的波动,使加入到TL494的管脚1即误差放大器I同相输入端IN+的信号尽可能地平滑和相对稳定。在有源简单二阶低通滤波电路与误差放大器I同相输入端IN+之间接有10kΩ的限流隔离电阻。把TL494的14脚输出的5V基准电压源,用一3.3kΩ精密多圈电位器W1分压作为设定输入信号,通过与处理传感器反馈信号相同的电路,送入TL494的管脚2,即误差放大器I的反相输入端IN-端。实验中发现,R19、R20这两个限流隔离电阻必不可少。否则,TL494误差放大器I的两个输入端的电位将相互影响。另外,实验数据还表明,TL494误差放大器的两个输入端在低电压时跟踪的线性不大好,故这里将两个输入运算放大器的放大倍数取为2,以改善反馈信号与设定信号的跟踪线性。
用TL494实现的单回路控制器的电路原理图如图3所示。
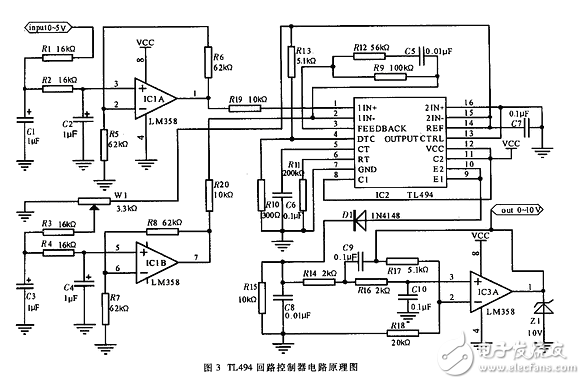
2.2 脉宽调制电路
在本控制器中只用到了TL494的误差放大器I,故将误差放大器II的IN+(16脚)接地、IN-(15脚)接高电平。为保护TL494的输出三极管,经R13和R10分压,在4脚加接近0.3V的间歇调整电压。R9、R12和C5组成了相位校正和增益控制网络。经过实验,在本控制器中振荡电阻和振荡电容分别取200kΩ和0.1μF。输出采用并取方式,取自发射级。整机电源取12V单电源。
2.2 输出电路
为了把脉宽变化的方波信号转换为大小变化的直流信号,通过开关二极管D1、电容C8进行整流滤波。R15作为整波滤波的输出负载,还在脉冲截止期间为C8提供放电回路,使C8上的电压与TL494输出的脉宽成正比。为使输出电压进一步平滑、提高带负载能力以及使输出电压在0~10V之间变化,又加入了一级压控电压源二阶低通滤波电路。在图中所示元件参数下,最大的直流输出电压是10V,IC3A输出端接的10V稳压二极管,是保证在意外的情况下,使输出电压不大于10V。
3 工作过程
当反馈信号大于设定值时,通过TL494的脉宽调制作用,其9脚与10脚并联输出信号的脉宽减小,这个输出信号再经整流滤波电路及隔离与放大输出电路,使最后输出的直流控制信号的电压相应下降。直流控制信号通过控制电路经执行机构(如电动机、电热管等)使被控制量下降,再进而通过传感器使反馈信号降低,形成单回路闭环控制。当反馈信号小于设定值时,上述控制过程相反。另外,还可以根据被控制系统的具体情况,来调整输入二阶低通滤波器的电容大小,使控制过程及时、准确、稳定。再有,为使控制过程直观,还应加上设定量及被控制量的显示(指示)电路。可从两个输入端取出信号,然后分别通过隔离放大电路(如用运算放大器组成的电压跟随器)送到表头指示。表头可采用多功能数字式电子表头成品或直接用满量程5V的机械表示。
4 实测数据分析
表1~表3的数据是在输出端接10kΩ负载电阻的开环条件下用DT9102A型数字万用表测得的。其中反馈信号及设定信号分别用精密多圈电位器对标准5V基准源分压来模拟,并且测量点取自IC1A及IC1B的输出端即IC1的1脚和7脚,输出取自IC3A的1脚。所有单位均为伏。

对实际的回路控制器电路测量了多组数据,限于篇幅仅更出以上三级数据。从测得的数据分析,我们可看出,在开环条件下该控制器的反馈信号的动态范围很小,仅在±0.225V范围内。当构成闭环联回路控制时,合理的控制系统中(执行机构的最大输出稳定值应为最大设定值的1.1至1.2倍),可以得出反馈量与设定量一定有一个动态平衡值,且在该平衡值睛,反馈量与设定量的一致性应非常好。也就是说,该控制器的控制灵敏度和控制精度都很高。
经实际应用,证明了以上的分析。该控制器的控制灵敏度和控制精度都很高,可完全取代一些成本高、电路复杂的单回路控制器。
综上所述,用TL494为主要元件实现的闭环单回路控制器具有构思新颖、电路简单、成本低廉以及控制过程稳定等特点,在很多工业控制场合可获得广泛的应用。
关于tl494,pwm,滤波器就介绍完了,您有什么想法可以联系小编。