图是IPM自举电路原理图。由图可知,自举元件一端接电路的输入部分,另一端接到同相位的输出电路部分,借输入、输出的同相变化,把自己抬举起来,即自举元件引入的是正极性的反馈。
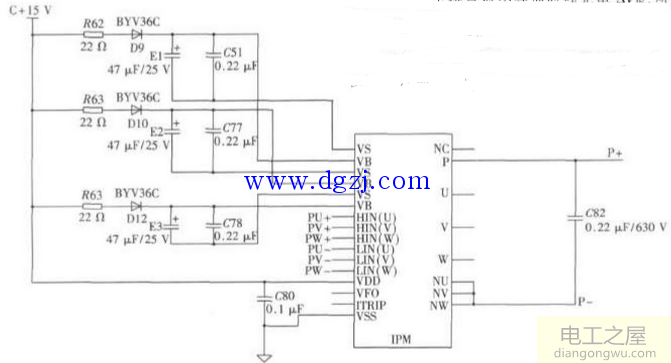
图 IPM自举电路原理图
对原理图中第一路自举电路进行分析[3-4]。IPM模块自举电路仅由自举电阻R62、自举二极管D9和自举电容E1组成,因此简单可靠。其电路基本工作过程为:当VS因为下桥臂功率器件导通被拉低到接近地电位GND时,控制电源VCC会通过R62和D9给自举电容E1充电。当上桥臂导通,VS上升到直流母线电压后,自举二极管D9反向截止,从而将直流母线电压与VCC隔离,以防止直流母线侧的高压串到控制电源低压侧而烧坏元器件。此时E1放电,给上桥臂功率器件的门极提供驱动电压。当VS再次被拉低时,E1将再次通过VCC充电以补充上桥臂导通期间E1上损失的电压。这种自举供电方式就是利用VS端的电平在高低电平之间不停地摆动来实现的。如图2所示,自举电路给E1充电,E1的电压基于上桥臂输出晶体管源极电压上下浮动。
由于运行过程中反复地对自举电容进行充放电,因此必须选择适当的参数,保证自举电容上的电压在电机运行时保持高于欠压锁定电平。
由上述分析可知,要保证E1的跌落电压能够得到及时、完全的补充,自举电路对下桥臂最小导通时间有一定的要求。但是若能正确选择各元器件参数,自举电路对下桥臂最小导通时间的限制将会大大降低。