一、RTU的定义
远动终端:电网调度自动化系统中安装在发电厂、变电站的一种具有四遥远动功能的自动化设备。
远动装置=远方终端=远动终端=RTU
二、RTU的发展概述
1.60~70年代,硬件式远动装置:晶体管或集成电路构成的无触点远动装置WYZ或数字式综合远动装置SZY,均属于布线逻辑式远动装置,所有功能均由逻辑电路实现,现已基本被淘汰。
2.80年代后,软件式远动装置:基于微机原理构成的运动装置(微机远动装置),功能由软件程序实现,具有功能强、可扩充性好、结构简单、稳定可靠等优点。
三、RTU的主要功能
1.远方功能:RTU与调度中心间通过远距离信息传输所完成的监控功能。
①遥测(YC):RTU将采集到的厂站运行参数按规约上传给调度中心。包括P、Q、U、I、档位、温度等,容量达几十到上百路。
另外还包括两类特殊YC:
a.数字值:RTU以数字量的形式直接接收后上传。
b.计数脉冲:单独的采集(电路)板。主要指RTU采集的反应电量的脉冲计数。容量可达到几十路电度量。
②遥信(YX):RTU将采集到厂站运行状态按规约上传给调度中心。包括:断路器和刀闸的位置信号、继电保护和自动装置的位置信号、发电机和远动装置的运行状态。容量达几十到上百路。
③遥控(YK):调度中心发给RTU的改变设备运行状态的命令。包括:操作厂站各电压等级的断路器、投切SVG、发电机组的启停等。容量可达几十个设备。
④遥调(YT):调度中心发给RTU的调整设备运行参数的命令。包括:改变变压器分接头位置(调压)、改变发电机组P或Q的整定值(调节出力)、自动装置整定值的设定等。容量可达几个到十几个设备。
⑤事故数据:
1.事件顺序记录(SOE):实时检测遥信变(YXBW)(带时标的遥信),立即记录变位时刻、变位设备序号、变位状态等组成SOE优先传送(CDT下)。
2.事故追忆(PDR):冻结某时刻全网的重要的遥测点、遥信点的画面(如照相),每个这样的画面称为一帧,其循环周期可为数秒到数分。典型的PDR记录长度为:事故前10min,事故后5min。
⑥统一时钟:具有对时功能。接收调度中心的校时命令。统一时钟为了不同厂站之间事故分析以及电度量冻结。
⑦转发:接收其它RTU送来的远动信息,按规约组装转发给指定的调度中心。
⑧适合多种规约的数据远传:基本远动任务配套标准EC60870-5-101(简称101规约)或其它CDT、Polling规约。具有同步或异步远动通信接口。
2.当地功能:RTU自身或连接的显示记录设备的实现监控功能。
①CRT显示:与RTU直接连接(或通过当地工作站)的CRT可显示RT采集的四遥、YXBW等信息。
②汉字报表打印:实现三类打印:定时打印、事件记录打印和召唤打印。
③本机键盘显示器:RTU自带的操作面板,实现循测、定测、选测和显时功能。
④RTU自检、自调功能:反映RTU的自身的可维护能力。插件损坏诊断,程序“走飞”时的自恢复能力、主备通道监视功能。
四,RTU基本结构
1,单CPU结构的RTU
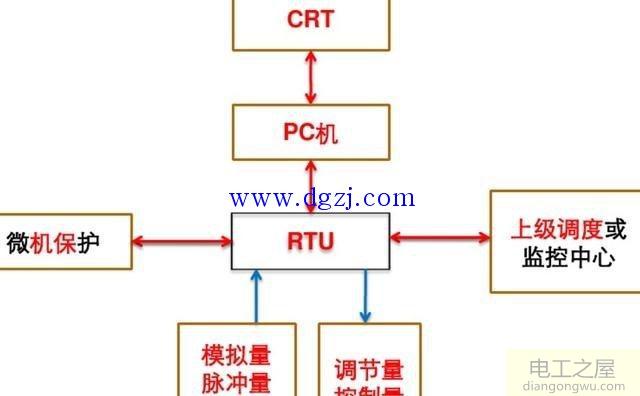
硬件组成:
①系统部分:CPU、总线、RAM、EPROM、计数次/计时器、中断控制器、串行通信接口。
②人机联系:打印机、显示器、健盘。
③输入/输出电路(可编程接口芯片):输入YC、YX输入YT、YK。
④通过总线连接。
软件组成:
①主程序:系统初始化、人及联系等。
②终端服务程序:完成RTU输入输出(时钟、A/D服务程序,通信发送接收终端等)。
2.多CPU结构的RTU结构
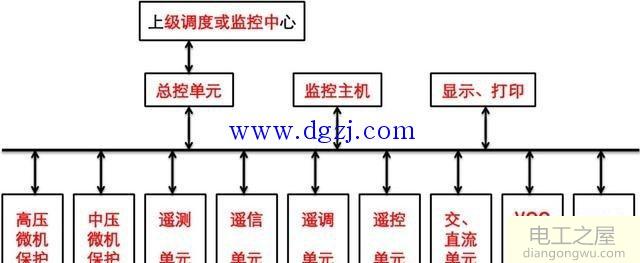
①主控系统:管理各子系统、人机联系、系统通信。②若干子系统:每个系统使用单独CPU,包括YX、YC、YT、Yk、VQC等。
③I/O总线连接主控系统和各子系统。
①主控程序:与子系统的通讯程序、调度通信程序、数据处理、人及联系等程序
②子系统程序:与主系统通信发送/接受、输入/输出程序等。
五、数据通信的基本概念和信道简介
1.电力系统自动化对数据通信系统的要求
(1)通信可靠性
(2)建设费用低
(3)满足现在和将来数据传输的要求
(4)通讯方式具有实用性和灵活性
(5)信道不受电网故障的影响
(6)易于操作和维护
2通信系统的构成
RTU→调制解调器→通信处理机→通信线路→通信处理机→调制解调器→调度计算机
(1)RTU:厂站数据终端
(2)调制解调器:二进制数据和模拟信号装换装置,模拟信号适合远传,近程可直接采用二进制数据。
(3)通信处理机:承担通信控制任务(缓冲匹配、误码检测、故障检测、路由选择、信道建立等。
(4)通信线路:传送数据信号的线路,公网或专网直接或通过通信处理机连接。
(5)调度计算机:类似于远动终端,指调度计算机系统。