目前齿轮测量中心的数控系统主要采用电子展成法控制,根据渐开线法线极坐标的线性关系,向两套伺服装置发送指令脉冲合成被测齿轮的廓线,主要缺点在于:必需实现极为精确的两轴联动方可使测头按被测齿轮的理论轨迹(如渐开线)运动,测量精度受限于运动控制精度,成本高售价昂贵。测头跟踪控制法可以节约成本,其缺点在于当测头脱离齿面时,无法再进行跟踪控制,在逐齿或间齿测量时,测头无法按标准轨迹进人下一测量齿的齿面,实现自动循环测量更加困难.
为了解决上述问题,作者研究了电子齿轮功能和齿轮齿廓偏差的测量原理,开发了基于电子齿轮功能的跟踪控制方法,同时解决了以上两种控制方法的问题,既可以保证按标准轨迹进行测头控制,又使得实现控制相对容易。
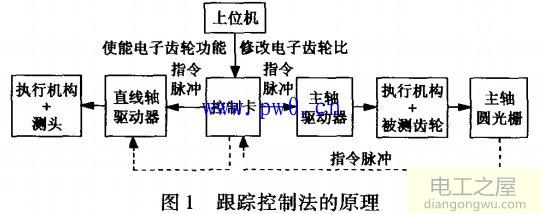
1基于电子齿轮功能的跟踪控制方法
测量机构由精密转台和直线导轨、驱动装置、光栅和微位移传感器组成,如图1所示。被测齿轮安装在带有圆光栅的精密转台(主轴)上,由交流伺服电机带动做旋转运动,跟踪测量时,圆光栅随转台转动并输出TTL脉冲信号,将此脉冲信号输人到带有电子齿轮功能的控制卡,使能控制卡的电子齿轮功能,使安装在直线轴导轨上的测头沿着被测齿轮的切向方向做直线运动。
电子齿轮模式能够将2轴或多轴联系起来,实现精确的同步运动,从而替代传统的机械齿轮连接.