ABB机器人如何建立外部TCP,一般情况下我们的工具是安装在机械手法兰盘上的,工件装在本体之外。工具坐标也是也是以tool0为基础所衍生出来的坐标,工件坐标以wobj0为基准所衍生出来的坐标。在当我们要建立外部TCP时,刚好和之前相反,也就是需要要把工具安装在机械手本体之外,工件装在机械手法兰盘上。
下面我们具体说下怎么设置的步骤,
一,我们先创建一个工具坐标系和Tooldata_2一个工件坐标系Workobject_2,具体方法我们这里不多叙述,工具使用4点法,工件使用三点法。
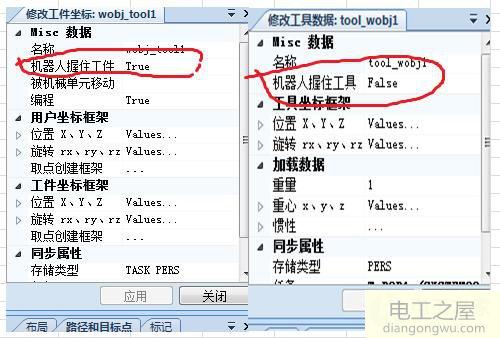
接下里我们再创建一个工具坐标系tool_wobj1,ABB机器人在创建工具,有一个选项,机器人握住工件,我们选择false。再创建一个件工坐标系wobj_tool1,有一个选项机器人握住工具,我们选择ture。设置如下图所示:
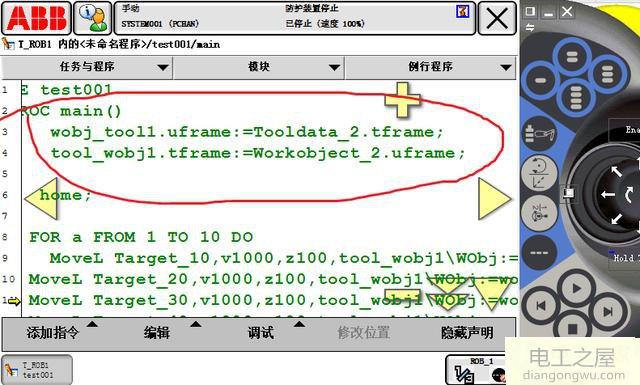
接下来我们把一开始创建的工具坐标赋值给工件,把工件坐标赋值给工具。如下图所示:
这样我们就经创建好一个外部TCP了。