步进电机的位置定位时,因为电机负载和转子储存的动能,不能立即停止,会产生超调量,反复经过设定点后停下来。此种反复振荡延长了定位时间,有必要改善电机的阻尼和定位时间。改善的方法有安装阻尼器和利用驱动电路及电机本身的改善等,下面将分别加以说明。
利用阻尼器的改善

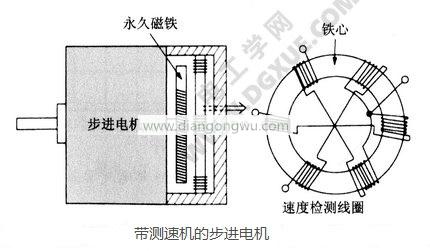
右图表示带误差动态阻尼器的步进电机的照片。此种阻尼器是在步进电机轴的飞轮上安装橡胶等特性装置,使飞轮的运动滞后于转轴的运动,利用与转子间的振动相位差对转子进行制动,改善暂态特性。
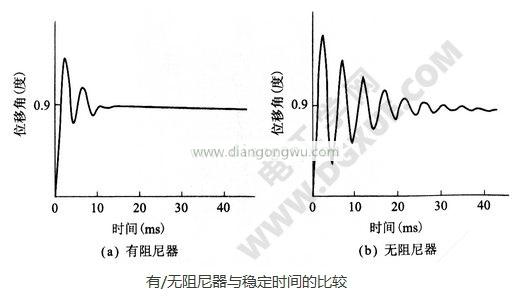
下图为带动态惯量阻尼器的步进电机暂态特性的步进响应的比较。此种吸振阻尼器不会像反相制动方法那样,在产生超调后才制动,但也不会消除最初的超调量。
此种动态惯量阻尼器可以改善步进电机高速区域的共振引起的转矩降低,也可以改善高速时的转矩和响应脉冲。
利用驱动电路的改善
半步进1-2相激磁的情况:阻尼以及定位时,利用2相激磁比1相激磁要好。所以两相步进电机使用半步进驱动的1-2相激磁时,停止相采用2相激磁,阻尼会变好。
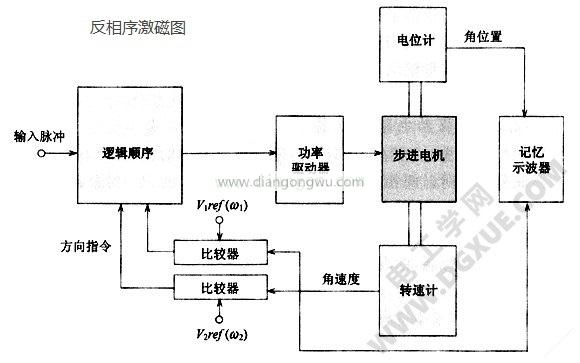
反相序制动:有关反相序制动,在前文《步进电机附加制动驱动方法:反相序激磁与最终步进延迟》已介绍。此种方法是最佳控制,即在最初的超调能抑制振动。为此介绍反相序制动用闭环回路。
下图表示步进电机及其后轴所带的测速机结构。
由测速机得到转子速度,在最佳时刻作反相序制动,其反相序激磁的电路框图如下。
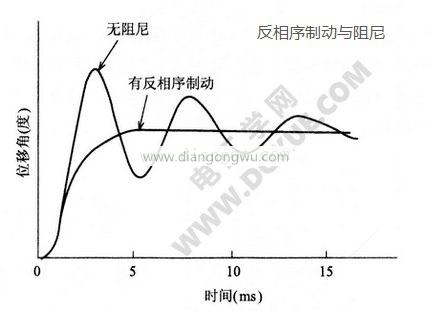
下图为有/无反相序制动的对比。因为闭环控制可在最佳的速度时间进行制动。
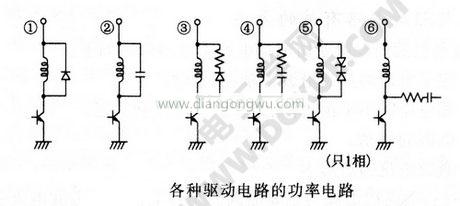
驱动电路输出段的结构:根据图前文《步进电机增加动态转矩的解决方法》中的下图所示驱动电路输出段结构,当功率管OFF时,尖峰吸收电路的导通,产生的制动转矩变大。其图中的①为制动转矩最小的结构。在高速时的转矩会降低,故要考虑转矩与制动转矩两者状态最佳时的驱动电路。
电机本体的改善
PM型步进电机的极异性和各向同性磁铁的速度-转矩特性比较在前面的《磁铁磁化方向:各向同性与各向异性磁铁的差异》中用下图已经介绍了,此时的两个电机的极异性永久磁铁的磁通大,各向同性磁通相对小。
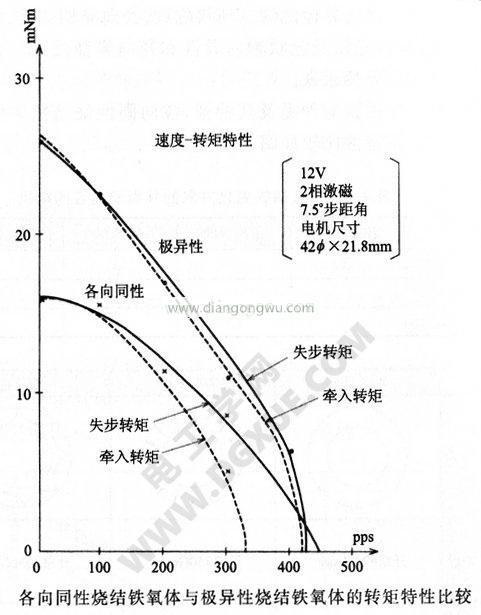
上图为这些电机在额定电压下的速度-转矩特性的比较。注意永久磁铁的磁通大小或激磁电压(电流)的大小与暂态特性。下图为极异性磁铁与各向同性磁铁的步进电机在12V额定电压下的阻尼特性的比较。
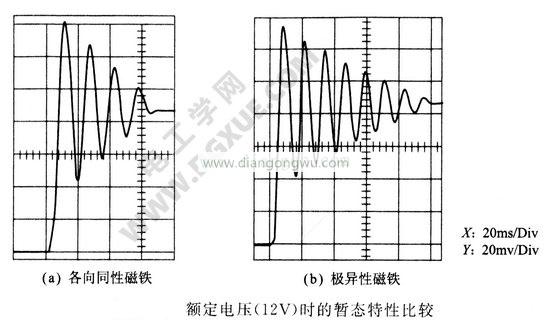
据此,定位时间方面,使用极异性磁铁的稳定时间长。但若降低驱动电压(降低为8V),则如下图所示,极异性磁铁的稳定时间变短。
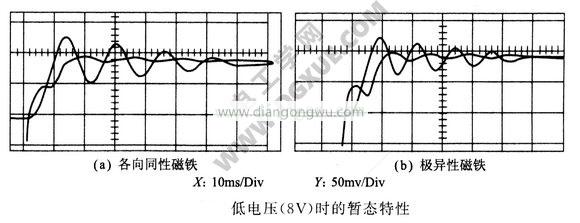
磁铁强的电机调整激磁电压(电流)时,稳定时间将变小。上图为几种电流的暂态特性。电流在转子转速大时会减小,此为受到反电势的影响所致。各向同性磁铁与极异性磁铁的周期比较,后者变短,振荡次数相同约为4,后者的稳定时间变短。