PM(Permanent Magnet,永久磁铁)型转子为内转子型(外部为定子,中间为气隙的电机),圆柱形转子的外表面分布N、S极(外表面无齿)。
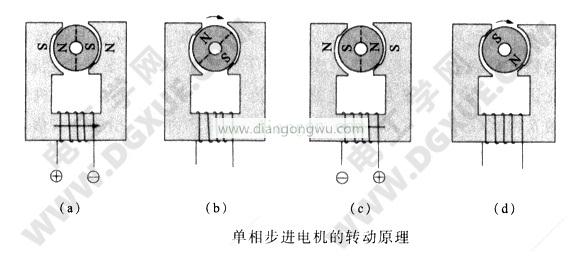
单相PM型步进电机
根据步进电机相数分类的单相步进电机如下图所示。有关内容在前节已经说明,此处不再赘述。
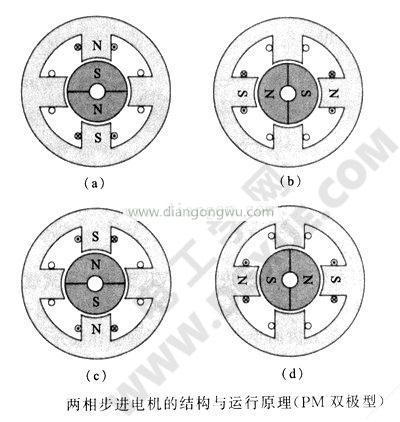
两相PM型步进电机
如下图所示的两相步进电机为例,定子绕组在圆周上分布排列,最简单的转子极数为2,即极对数Nr=1。
根据式θs=180°/PNr,令P=2,则机械角θs=90°/Nr,此90°为电气角表示的步距角,电气角除以Nr即为机械角。转子极数为2,即Nr=1,则电气步距角与机械步距角相等,为90°(θs=90°/PNr)。
两相PM型电机定子内圆有四个磁极,每个磁极上绕了一个线圈,每两个相差180°的磁极线圈组成一相绕组,PM型步进电机的单极和双极工作方式在上文“两相步进电机”中均已说明。
下面以单极工作方式为例说明步进电机的旋转原理,如下图所示,可知转子步距角为90°,4步旋转一周(360°)。

图中在一个磁极上绕了两个线圈,每个线圈的激磁电流只流一个方向的电流,故图(a)中A相线圈为下层线圈,“杠A”为上层线圈。步进1状态,给1相下层线圈A相通电,在上磁极产生N极,下磁极产生S 极,利用定转子磁极异性相吸,直至平衡位置。
然后1相电流断开,2相线圈B相接通电流,定子磁极左边为S极,右边为N极,吸引转子顺时针旋转90°,转到步进2状态,如图(b)所示。再次电流切换到1相线圈“杠A”相,1相磁极反转,转子顺方向(顺时针方向)旋转。如磁极上为单线圈,则线圈需要流过正反向电流(此为双向驱动,Bipolar)。
图中1相有两个线圈,电流单向流过,两个线圈产生的极性相反,给“杠A”线圈通电,磁极极性反转成为图中(c)所示状态。同样原理,2相线圈依靠电流的方向的变化,使其磁极极性从第2步变成第4步的极性,使转子旋转到图(d)状态,此时,转子由第3步顺时针转过90°到第4步。不断重复进行第1步至第4步,转子就连续旋转。如要逆时针旋转,只要使第2步与第4步的定子极性相反即可。